

来源:网络转载更新时间:2020-07-15 15:58:11点击次数:3783次
控制原理
 |
 |
色标检出的光电开关输出信号与近接开关闭合的信 号分别作为中断源,并设立一个时钟(计数器),进行 计数。
已经到来〈图2a),说明凸轮处于I位置,商标定位准确,不必进行增减速的补偿修正。
该控制系统增加的修正量的自动调整功能,可以使修正量不再人为设定,而是根据每 次色标与光电开关的距离自动调整,且增减速补偿修正一次到位,达到了智能的效果。
二、系统硬件设计
在MCS-51系列的单片机中,我们选用8751芯片,基本电路见图3。为了突出重点,图 中只画出与控制软件设计有关的硬件核心部分,省略了一些辅助电路,保护电路及电源等。
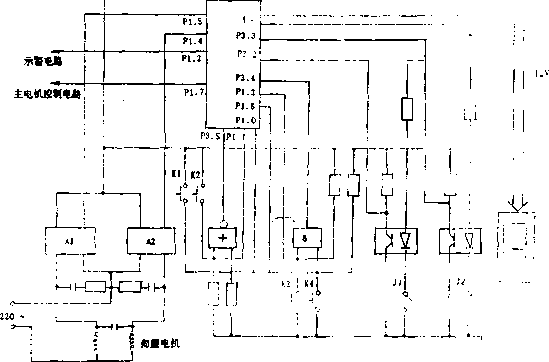
考虑到系统外部需要屮断服务的信号源较多,为了简化控制电路,不再进行硬件上的 外部中断源的扩丿二把定时器/计数器0, 1溢出中断作为外部中断源使用,其中定时器/计 数器。作为有关修正量的设置与档次选择中断之用,定时器/计数器1作为强制增减速中断 之用。光电开关输岀信号作为外部中断源0,近接开关闭合信号则作为外部中断源
现将电路中与8751有关联的主要元件说明如下:
K1:强制伺服电机正转按钮。
K2:强制伺服电机反转按钮。
KI, K2这两按钮在试机时,在使用固定修正量运行包装时方便用户校准商标位置。
K3:固定修正量选择按钮。固定修正量分为9档(1〜9),由数码显示岀所选择的 修正量的档次,数码管显示的数字编码可由8751的PO, P2口输出。这是为了与目前流行的 控制系统相兼容。
K4:设定修正量为自动调整状态按钮。在包装机运行过程中,按一下此按钮,就会进 入修正量自动调整状态,此后不必再进行人工干预。
J1:标志检出光电开关。
J2:凸轮上的近接开关。
J1,J2是12V电源,因此通过光电隔把中断信号送给INTO, INTI。
A1.A2:固态继电器。用它控制伺服电机的正反转。
8751的P1,2送出示警信号给示警电路,P1.7送出电机控制信号给上电机控制电路。 8751的晶振选用12M,以提高控制速度。
三、系统软件设计
整个程序由主程序和四个中断服务程序组成。
主程序主要是系统的初始化。
四个中断服务程序分别为1、强制增减速,2、修正量的自动调整与固定修正量的档 次选择,3、响应光电开关输岀信号.4、响应近接开关闭合信号。后两个中断服务程序 是软件的核心。下面就这两个中断程序说明如下:
在包装机运行过程中,近接开关闭合信号由于凸轮的旋转会周期发生。光电开关输出 信号产生的中断与近接开关闭合信号产生的中断的先后顺序,是由薄膜前进的速度快慢所 决定,是随机的。至于•两个中断间隔时间的长短,则由薄膜上的定位色彩与光电开关的距 离误差大小、商标的尺寸、包装速度等诸因素所决定。对于使用固定修正量运行包装机的 情况.为了与现行控制系统相兼容,在程序中设计成同时响应这两个屮断后才进行增减速 补偿。对使用修正是的自动调整来运行包装机的情况.则在响应其中任何一个中断后,立 即进行补偿。
程序屮设定几个位作为状态标志。通过这几个状态标志,在两个屮断服务程序屮,判 别修正景是自动调整状态还是选用固定修正状态,光电开关输出信号中断与近接开关闭台 信号屮断的先后顺序,是否要进行增减速偿等。
00H:当0叫=0修正最为自动调整状态,当00H= 1为固定修正量的状态。
01H:当01H=I光电开关已发生过中断。
02H:当。2H= 1近接开关已发生过中断。
03H:当03H=l无法修正。
04H:当04H= 1不修正。
光电开关输出信号中断服务程序的流程框图见图4,近接开关闭合信号的中断服务程 序的流程框图见图5。
(V-4) 2 + (P-4) 2= 22
d P V - 4
其斜率为——=- —--
d V P - 4
令它与绝热线的斜率相等,则有
V- 4 P— ------ = —y-----
P- 4 V 联立⑩、05即可解得方程的解有两个,得分界状态的坐标有两个,其位置在圆上的A、B 两处,即圆与过4的绝热线外切于以,与过B的绝热线内切于B "按照与例一类似的分 析,可知BCA是吸热过程,ADB是放热过程。 *
假如给出的过程曲线不是光滑曲线,则必须从曲线的转折处把所给的过程分成数个宏 观过程进行分析讨论,方法仍然是类似的。
四、小结
不加分析就把一个宏观过程看作单纯的吸热或放热的单一过程往往是错误的,这点在 教学中常常因教师的疏忽造成学生在概念上的模糊。判定一个系统的宏观变化过程吸放热 情况的有效方法是:在P~ V图上去求过程曲线与绝热线相切的切点的坐标,.找到系统吸 放热的分界点,再根据本文第二部分第3点中的结论加以判定。
本文源于网络转载,如有侵权,请联系删除
 ×
×



