

来源:网络转载更新时间:2020-07-03 10:12:53点击次数:4098次
方便针是在普通手缝针的基础上为方便用户使用而开发生产的一种新型手缝针,主要面向国际市场。 目前生产厂家多以散针(未经包装)的形式供货。为了进一步提高产品的附加值和外观形象,使其更好地与国际市场接轨,有必要设计生产一种方便针自动包装机。但由于没有类似的自动包装机械可供参考,因此,其运动方案设计难度较大。为了解决这一难题,本文从功能分析入手,应用设计方法学和创造学的方法, 设计方便针自动包装机的运动方案。
Levenberg - Marquardt优化算法训练网络时,网络的迭代次数少,网络的收敛速度快,且可得到较小的训练误差。
表2中列出了四组正常样本和四组剧烈磨损样本用来验证网络的识别效果。由表2可看出网络均能正确识别(为AR模型的前十个自回归系数, 犬为模型的残差方差)。
表2神经网络识别结果
|
|
正常状态 |
剧烈磨损状态 |
||||||
|
|
1 |
2 |
3 |
4 |
1 |
2 |
3 |
4 |
|
伊1 |
1.0000 |
0 |
0. 2086 |
0. 2358 |
0.1025 |
0. 5007 |
0.3678 |
0.1381 |
|
|
1.0000 |
0 |
0. 2092 |
0. 2363 |
0.1032 |
0. 2466 |
0. 3682 |
0.1388 |
|
呼3 |
1.0000 |
0.2400 |
0 |
0. 4199 |
0.3188 |
0.4277 |
0.5203 |
0. 3458 |
|
甲4 |
1.0000 |
0.2400 |
0 |
0.4200 |
0.3188 |
0. 4277 |
0.5204 |
0.4259 |
|
甲5 |
1.0000 |
0.2400 |
0 |
0.4200 |
0.6207 |
0.4277 |
0.5204 |
0.4259 |
|
06 |
1.0000 |
0. 3999 |
0 |
0.4200 |
0.6207 |
0.4277 |
0. 5204 |
0.4259 |
|
|
1.0000 |
0.4001 |
0 |
0.4202 |
0.6208 |
0.4279 |
0.3461 |
0.4261 |
|
|
1.0000 |
0.4003 |
0 |
0.3193 |
0.6209 |
0.4281 |
0. 3463 |
0.4257 |
|
伊9 |
0.3887 |
0.6445 |
0 |
0. 5140 |
1.0000 |
0.6892 |
0.5575 |
0.6847 |
|
甲10 |
0.3887 |
0. 6437 |
0 |
0.5139 |
1.0000 |
0.8337 |
0.5574 |
0. 6845 |
|
|
0 |
0.4166 |
0.4709 |
0. 2049 |
1.0000 |
0.7345 |
0. 2759 |
0.4839 |
|
输出 |
0.9805 |
0.9825 |
0. 9804 |
0. 9796 |
0.0079 |
0.0090 |
0.0105 |
0.0110 |
—、设计要求
方便针的包装采用如下形式:首先将6只针插在包装纸上,然后再将包装纸装入透明的塑料盒中。根据所确定的方便针包装形式,对方便针自动包装机提出以下具体要求:
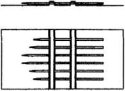
图1方便针包装形式
方便针自动包装机主要完成将6只方便针插入包装纸中。由于将插好的包装纸装入包装盒的动作比较 简单,因此,可由人工完成,以便降低方便针自动包装机的复杂程度和设计难度。
二、总功能分析及功能分解
根据设计要求可知,总功能就是把6只针按照要求的顺序排列并插入包装纸中。通过对总功能的分析可知,其机械系统比较复杂,难以直接求得满足总功能的系统解,所以把总功能分解成能直接求解的分功能(功能元)。这些分功能与机器所要完成的一系列相互独立的工艺动作相对应,并用树状功能图(见图2)
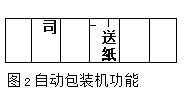
来描述。如图2所示将总功 能分解为出料、排料、送料、 送纸、插针、切纸6个分功能。
包装机工作过程如下:
3.送料机构开始工作将其送到插针工位,同时送纸机构将包装纸送到插针工位。4.最后插针机构完成插针动作,同时切纸机构在切纸工位将插好6只针的带状包装纸按规定长度切断。 插好6只针的包装纸在重力作用下沿滑道进入料箱。
三、运动方案设计
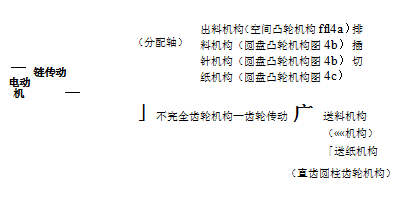
由于各分功能所对应的工艺动作彼此之间必须按照严格的工作时序进行工作,因此拟将主要执行机构设计成凸轮机构,即靠装在同一个分配轴上的多个凸轮来准确控制各执行构件的运动,以实现相应的工艺在包装机工作过程中,岀料、排料、插针、切纸4个工艺动作均为往复移动,实现上述工艺动作的各执行机构的原动件均为凸轮,同时考虑到包装机的整体布局及结构设计要求,上述4个执行机构最终选定为不同类型的凸轮组合机构,将各凸轮的连续转动转化为不同方向的间歇往复移动。
按照设计要求送料及送纸动作应为单方向的间歇运动,在实现上述工艺动作的传动机构中必须包含不完全齿轮机构或槽轮机构等间歇运动机构。考虑到与其它各执行机构的匹配、相互组合的关系以及结构设计要求等方面的因素,最终选择了不完全齿轮机构与其它齿轮机构、蜗轮蜗杆减速器、链传动共同组成包装机的传动系统。根据方便针的形状特点,送料动作的执行机构选择了螺旋机构。送纸动作的执行机构选用带有滚轮的直齿圆柱齿轮机构,靠相互压紧的一对滚轮实现单方向的间歇送纸动作,同时完成在包装纸上压出两道棱脊,为接下来的插针动作做好准备。
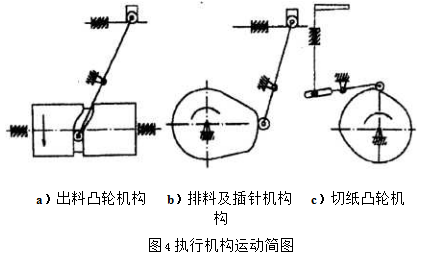
根据所设计的方便针自动包装机要求性能良好、 结构简单紧凑、工作平稳可靠、成本低的特点,最终确定方便针自动包装机机械运动方案如下:
各执行机构的运动简图如图4所示,其中两组排料机构和插针机构由于执行构件的运动形式相同,因此均选用相同形式的凸轮机构,如图4b所示,但构件尺寸和运动规律各不相同。
四、结论
本文源于网络转载,如有侵权,请联系删除
 ×
×



