

来源:网络转载更新时间:2020-09-14 10:03:30点击次数:3574次
水泥是最主要的建筑材料之一,广泛应用于工业与民用建筑、道路、水利和国防工程。水泥包装过程中有2个关键问题,一是称重精度,二是称重速度。在水泥包装过程中为了提高包装精度,水泥包装线采用电子皮带秤进行称量⑴。电子皮带秤是通过测量电子皮带秤上物料的重量及皮带运行的速度来进行计量的,是实现生产过程自动化和智能化的重要技术手段。
1电子秤称重原理及控制系统的组成
1.1皮带秤称重原理
皮带秤的称量过程是:当物料通过皮带秤输送机计量段时,物料对称重托編产生压力,称重传感器输出一个0~20mV与物料重量成正比的电压信号,然后放大成0~5V的电压信号,经A/D转换器转换后送往CPU进行运算;测速传感器检测出与速度成正比的脉冲信号并送往PLC控制器进行运算,测控系统对检测到的信号进行处理,显示重量、速度等参数。皮带秤的称重装置安装在输送机上,即秤台。由于称台是直接检测物料重量的部件,因此它是决定皮带秤精度的关键部件。秤台由传感器、承重机构和称重托辐等组成。与传感器顶部相接的称重托辗有单托辗和双托辐。两种双托辐秤架配有2组计量托辐,其计量精度优于单托辐秤架。本系统中采用双托辐秤架结构,双托辐测量示意图如图1所示。若测量得到皮带单位长度的载荷量为g(kg/m),皮带传动速度为队m/s),则在7时间间隔内的物料重量W为:
w=\ dt (1)
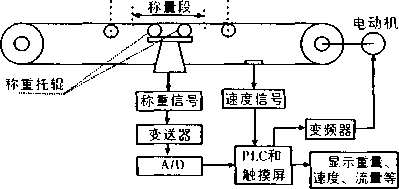
图1双托棍测量示意图
1.2电子秤控制系统的组成
电子秤具有检测速度快、精度高的特点,是典型的机电一体化系统,它由测控系统和称重秤架两大部分组成。系统组成框图如图2所示。测控系统硬件部分由称重传感器、测速编码器、高精度A/D转换器、变频器、西门子PLC控制器S7-300和触摸屏等组成,为了增强称重采样的稳定性,系统将双传感器安装在皮带两侧,以减小物体偏载。除了选用高精度的A/D转换器模块外,还配有自动校准法码,以提高系统精度⑵。电子皮带秤的传动是由一台可变频调速的交流异步电机带动的。由于西门子PLC功能强大,其指令速度快,缩短了扫描周期,增强了控制的实时性,其性价比高。因此本系统选用西门子S7-300PLC作为控制主机,它带有以太网接口、MPI接口、远程I/O接口和串行口,可方便通过Profibus-DP现场总线进行各PLC之间的通信。触摸屏与主机之间采用RS-232通信。PLC主要完成对输送设备和称量过程的实时控制,对系统故障检测显示、报警和其他设备的通信等。
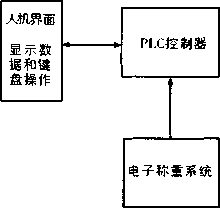
图2系统组成框图
2系统工作过程
电子皮带秤是通过对流量的控制来实现及时显示流量和准确称量。本系统通过软件将检测到的重量传感器信号和速度传感器信号进行转换、积算求出瞬时流量,进而求出物料重量,因此皮带称的控制过程是对速度信号与称量信号的釆集和控制。皮带秤系统上电后将检测送至PLC接口的瞬时流量Qn与触摸屏终端上设定流量Qs的值,然后进行比较形成偏差。根据此偏差值e的大小,将自适应模糊PID运算产生的控制信号传给变频器,变频器根据输入值调节电机的转速,使系统连续工作,系统控制框图如图3所示。PLC中CPU处理的是数字量,因此应先将传感器检测到的信号经A/D模块转换成数字信号后供给CPU,按照设定的算法进行计算处理;同理,经CPU运算后的数字量要经过D/A模块转换成模拟信号后供给变频器,从而实现对电机转速的闭环控制。同时,重量和流量等数值也及时显示在触摸屏上。
3系统自适应模糊PID控制原理及设计
3.1模糊PID控制原理
电子皮带秤是通过控制流量来测定瞬时流量和累计量,因此本系统为流量闭环控制系统。通过对电机转速的控制实现流量控制,确保包装物料的准确性和快速性。为了实现皮带秤系统的实时、高精度和快速性,在系统的控制中采用了自适应模糊PID的控制算法。图4为模糊PID控制器原理图,它是将模糊控制与常规的PID控制相结合,应用模糊推理的策略,根据偏差e及偏差变化率ec的值,对PID参数53进行在线自调整,以达到最佳控制效果。在图4所示系统控制器中,采用自适应模糊PID控制,选用流量误差e及其变化率ec作为模糊控制器的输入语言变量,将kp,kt,kd作为模糊控制器输出的语言量,它构成了一个3变量的2维模糊控制器,图4中e和ec分别为流量偏差及其变化率的精确值,E和EC则分别为模糊化后的值。作为模糊推理输入量,在运行中不断检测由模糊控制规则推理和解模糊化后得到的PID参数a,这样实现在线调整PID的3个参数,再由PID输出值控制变频器的输出,实现对皮带秤的快速、准确的控制,得到良好的动、静态性能⑶。
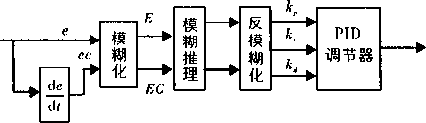
图4模糊PID控制器原理图
3.2模糊化
将输入量E和EC量化在[-6,+6]之间,在其论域上取7个语言变量,负大、负中、负小、零、正小、正中、正大,分别用NL、NM、NS、ZE、PS、PM、PL表示。其隶属函数表示某一确定量对E、EC模糊子集的隶属程度,可应用隶属函数实现精确量的模糊化,其隶属度函数均为正对称的均匀分布的高斯三角函数,如图5所示。另外,模糊控制器的输出53论域分别设在[-0.2,+0.2],[_2,+2],[-0.02,+0.02]之间,在其论域上取7个语言变量,负大、负中、负小、零、正小、正中、正大,分别用NL、NM、NS、ZE、PS、PM、PL表示,其隶属度函数均为三角函数⑷。
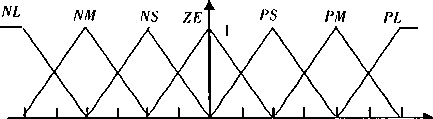
图5E.EC和隶属函数
3.3模糊推理和规则库
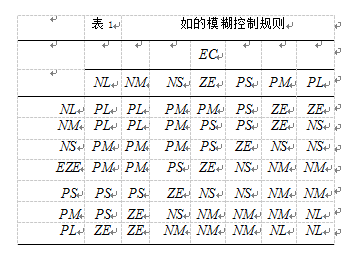
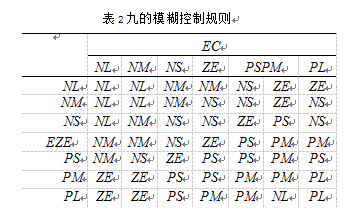
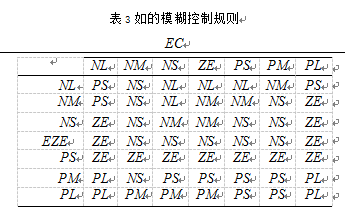
模糊推理是指将固定规则中的语言变量所对应的模糊关系集进行模糊运算,控制规则是指专家的经验总结。由系统的动态和静态性能分析可知:如的作用是加快系统的响应速度,使系统快速减小误差;4的作用是消除静差,改善系统的稳态;奶的作用是对偏差变化进行提前控制,在响应过程中抑制偏差向任何方向变化,改善系统的动态性能。根据3个参数之间的相互关联,综合考虑E和EC实际经验,总结出其模糊控制规则如表1~3所示⑸。
根据规则库的输入输出关系,釆用Mam-dani模糊逻辑推理,求出模糊输出值,并釆用重心法解模糊。本系统采用离线计算方式,先将模糊控制规则离线计算后转化为查询表,则推理过程可简化为查表运算,这样实现了模糊控制器的实时控制和系统的快速性。
4软件设计
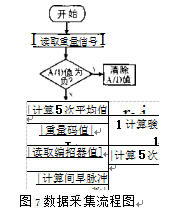
系统采用西门子S7-300PLC作为控制核心,以触摸屏为人机界面构成控制系统,PLC的程序设计包括2部分,即系统程序和用户程序。本设计是对用户程序进行设计,其功能包括:给定值设定、数据釆集及变换、触模屏参数修改程序、调零及校秤程序、模糊PID运算程序、数据处理程序、报警及显示等。图6为主程序流程图,其功能是进行系统自检和初始化,若硬件正常,则系统周而复始地分时进入中断程序,处理输入、输出信息。图7为数据采集流程图。
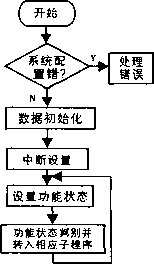
图6主程序流程图
5结束语
本文将模糊PID控制算法引入到电子皮带秤系统中,并将PLC作为控制器。一方面模糊PID控制算法不依赖于对象的精确模型,能克服系统的时变和非线性的影响,控制效果好;另一方面系统充分利用PLC的可靠、灵活、抗干扰能力强及较好的通信功能等优点,提高了系统的智能化程度。基于模糊PID控制算法和PLC控制器相结合的电子皮带秤系统,控制程序实现了模块化和标准化,具有编程灵活、方便实现模糊PID的控制规则和算法等优点,降低了系统开发成本,且有效地解决了过去皮带称系统的动态性能不理想、精度不高、可靠性差等问题,应用效果好,有一定的推广价值。
文章来源于网络转载,侵删
 ×
×



