

来源:网络转载更新时间:2020-09-14 09:22:28点击次数:4460次
1定量给料电子皮带秤的结构和工作原理
定量给料电子皮带秤是一种自动测量和控制传递的物料流量的称量装置,广泛应用于颗粒或粉状的物料配料系统中。电子皮带秤由秤体、重量传感器及称重控制系统组成。秤体部分由传送带、传动机构和支架组成。称重控制系统由滑差电机和称量控制器组成。结构如图1所示。
重量传感器将检测到的物料毛重信号g1送入控制器,经去皮后物料净重为g。滑差电机中附有测速电机,测出的转速信号V送入控制器。控制器根据公式Q=Kgv计算瞬时物料流量Q(公
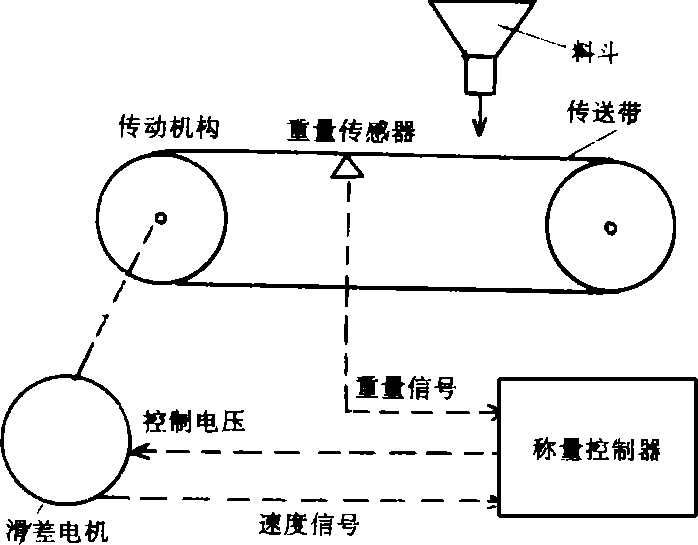
图1电子皮带秤的结构
式中的K为比例常数),如果电子皮带秤给定的物料流量为Q给,则根据偏差值e=Q给-Q和偏差变化率ev=∃e∃t,按设定的控制算法给出控制量u,调节滑差电机的转速,使Q=T1Q给,与此同时,控制仪按公式G=∫0Qdt计算传送的物料量,这就是定量给料电子皮带秤的工作原理。
2控制算法的确定和FUZZY—PID控制算法
调速定量给料电子皮带秤用于配料系统中,对给料流量的控制有很高的精度要求。我们研制单片机控制的定量给料电子皮带秤的初期,采用的是PID控制算法,挂码检定时还能达到要求的控制精度,实物检定时,特别是物料颗粒大小不一时,控制精度达不到要求。这是由于料斗下到传送带上的物料重量是随机变化的,控制系统的特性是时变的,其数学模型很难确定。因此采用了FUZZY—PID控制算法,下面就对该控制算法进行介绍。
211数字PID控制算法
数字PID控制算法有位置式算法和增量式算法两种。我们根据控制对象的情况选用的是位置式算法。PID的控制原理框图如图2所示。
PID位置式算法的算式为

图2PID控制原理框图
u=u
+K{e-e +Te+TΑ[e- 2e
+e ]}
i i-1
p i i-1 i iI
i-1
i-2
式中 Kp——比例系数 TI——积分时间
TΑ——微分时间 T——采样周期合理选择Kp、TI、TΑ、T是系统实现最佳控制的保证。
212模糊控制器(FC)
模糊控制器由三部分组成。模糊化、模糊推理决策、逆模糊化。其结构框图如图3所示。
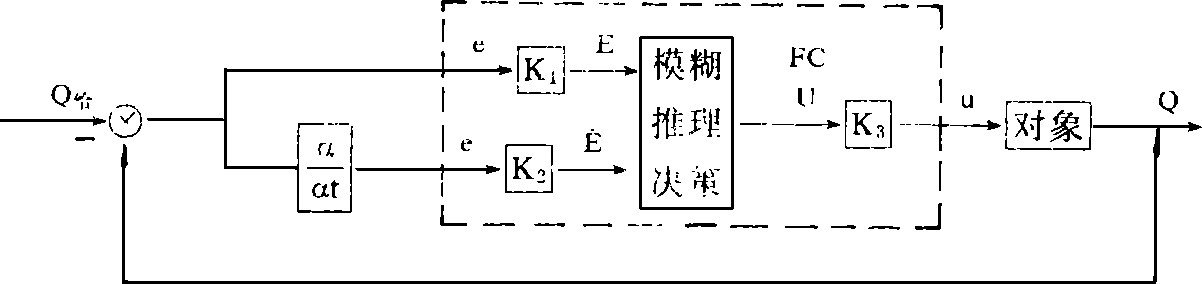
图3模糊控制器的结构框图
计算机计算对象的输出值Q和给定值Q给的偏差值e及偏差值的导数eα后,经量化因子K1和K2离散化,分为7个模糊子集,即
E{NL,NM,NS,0,PS,PM,PL}
Eα{NL,NM,NS,0,PS,PM,PL}
将它们的量化论域分别定为:
E{- 5, - 4,- 3,- 2, - 1,0,+ 1, + 2, + 3,+ 4,+ 5}
Eα{- 5, - 4,- 3,- 2, - 1,0,+ 1, + 2, + 3,+ 4,+ 5}
U{- 5, - 4,- 3,- 2, - 1,0,+ 1, + 2, + 3,+ 4,+ 5}
如果确定e的最大变化范围为[A,B],eα的最大变化范围为[C,D],那么
K1=
+5- (-5)
B-A
10
B-A
K2=+5- (-5)
D-C
= 10
D-C
根据实际经验,对此双输入(E和Eα)单输出(U)的模糊控制器,构造形如IFE=NL
ANDEα=NL,THENU=PL的控制规则表,结合量化论域的分级及对模糊子集的隶属度,
得到模糊控制表,存于数据存储器中。表1是我们在电子皮带秤模糊控制器中用的模糊控制表。

模糊推理决策的过程就是查表输出的过程,从而得到输出量U,U经比例因子K3逆模糊化,将模糊输出量U转化为精确量u,施于被控制对象。
213FUZZY—PID控制算法
对于时变数学模型难以确定的控制对象,FUZZY控制算法有较强的适应性,但模糊控制不具备积分作用,不能消除稳态误差,对稳态精度的控制不能令人满意,在给定值附近,模糊控制反而容易引起振荡。由于PID控制中有积分作用,能消除稳态误差,因此将模糊控制和PID控制相结合,发挥这两种控制各自的长处,形成了FUZZY—PID控制算法,即大偏差时采用模糊控制,小偏差时采用PID控制。图4是其结构框图。

图4FUZZY—PID控制框图
程序判断偏差e的大小进行控制模式的切换,E0的数值根据控制要求通过现场调试确定。
3 控制器的硬件电路
控制器的硬件电路结构如图5所示。控制器以8031单片机为核心,还包括有下列电路:
311重量信号输入通道
重量传感器把重量信号转换为电压信号,经放大器放大后,再进行VF转换,送入
8031的T0口进行计数。
312传送带速度信号输入通道
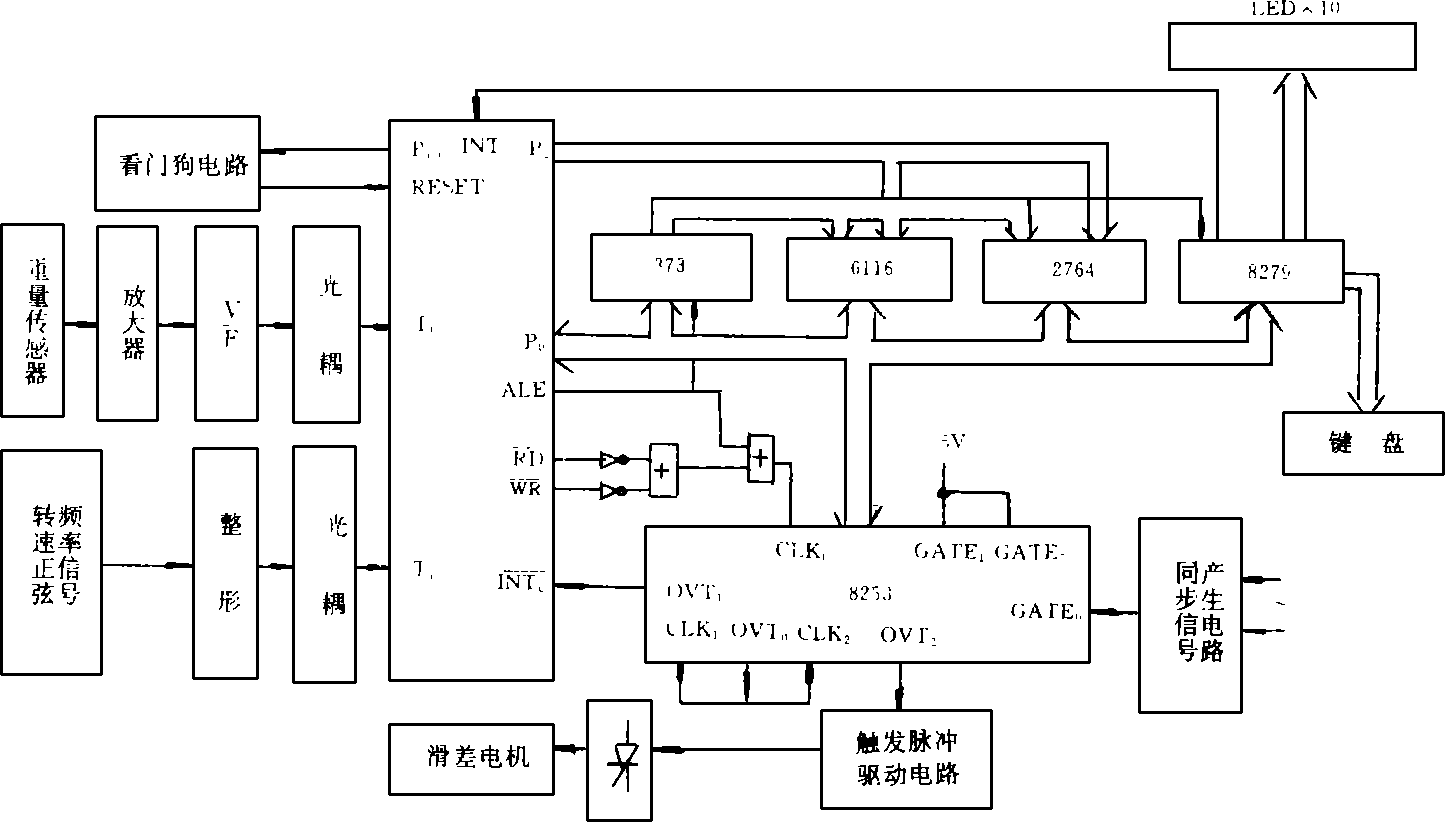
图5控制器的硬件结构框图
传送带是由滑差电机驱动传动机构带动的,滑差电机的转速反映了传送带的速度。滑差电机附有的测速发电机产生频率与转速成正比的正弦电压信号,经整形后送8031的T1口计数。
313键盘和显示器的接口
由8279构成16键键盘和10个数码管显示器的接口。6个数码管显示下料量G,另4个数码管显示物料流量Q或给定物料流量Q给等参数。
314定时电路
定时电路产生半秒钟定时中断信号,以便把1秒钟分成两半,前半秒为对重量信号和转速信号计数时间,后半秒为计算物料流量Q、累计下料量G和送控制量u的时间。半秒的定时信号由8253的O通道和1通道对8031的ALE分频获得,该信号送8031的INT0端实现定时中断。
315滑差电机的转速控制电路
滑差电机的转速由线圈的励磁电压决定,该电压由晶阐管对电网中的一相电压进行半波整流获得,控制电路由8253的2通道构成数字触发器。改变8253的2通道的时间常数字就改变了输出触发脉冲跟同步信号上升沿的时间间隔,即改变了晶阐管的导通角。从而使晶阐管输出的直流电压改变。
316带掉电保护的数据RAM6116
该RAM用来存储FUZZY—PID控制器的参数Kp、TI、TD、K1、K2、K3、模糊控制表、给定流量Q给、皮重g皮、流量计算比例常数K,以及计算所得的数据G、Q、e、i等。
317看门狗电路
用来抗电磁干扰,防止程序“跑飞”。
ei-1、ei-2、ui、ui-1
4控制器的软件设计
控制器的软件由主程序,键中断服务程序和定时中断服务程序组成。
主程序完成初始化和按显示标志显示相应参数的功能,其程序框图如图6所示。
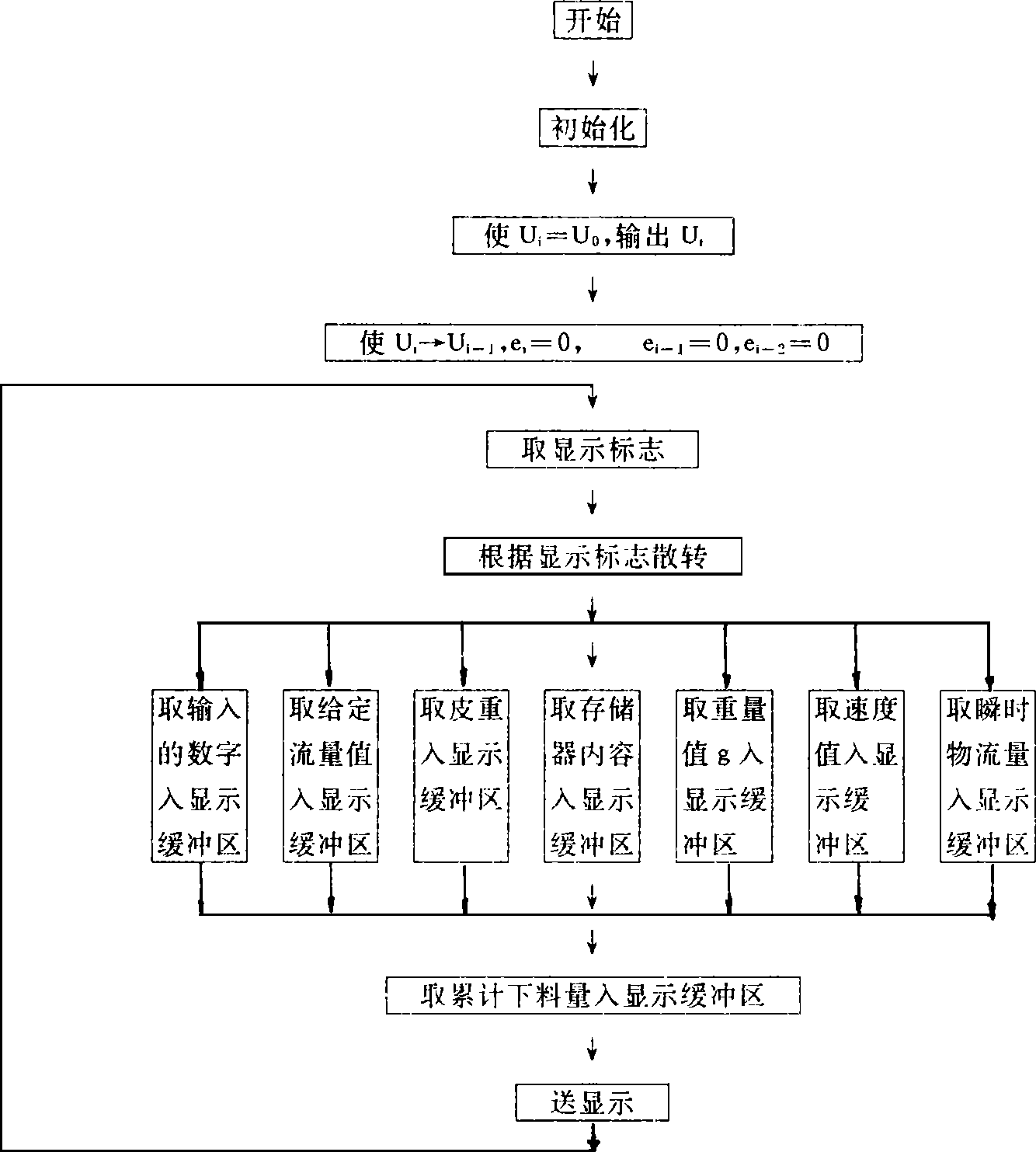
图6主程序框图
键中断服务程序完成各种参数的设置,测皮重及测量控制物料流量的操作转换等功能。其程序框图从略。
定时中断服务程序完成重量信号的数据采集,传送带速度信号的数据采集,瞬时物料流量Q的计算,下料量G的积算,控制量的计算和输出,皮重的测量和计算。其程序框图如图7所示。
5结束语
采用FUZZY—PID控制算法的定量给料电子皮带秤控制器,经实物现场检定,完全达到控制精度的要求。配备该控制器的定量给料电子皮带秤已于1994年在滁州通用电子机械设备厂投产,并已在一些中、小型水泥厂的生料配料系统和熟料配料系统中推广使用。由于能保证配料按要求的配比投料,提高了水泥产品的质量和产量,获得用户的好评。
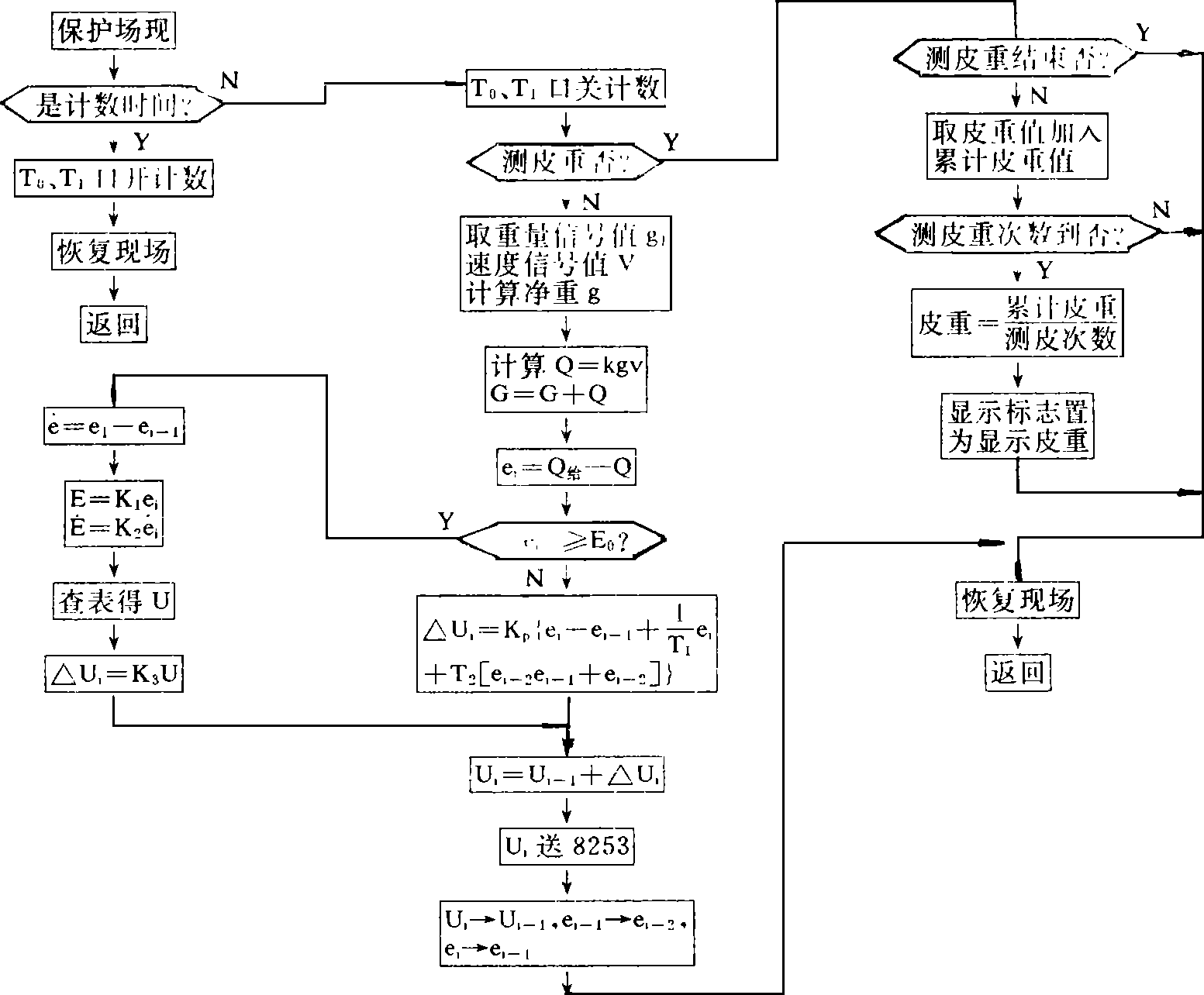
图7定时中断服务程序框图
文章来源于网络转载,侵删
 ×
×



