

来源:网络转载更新时间:2020-08-17 10:56:42点击次数:4250次
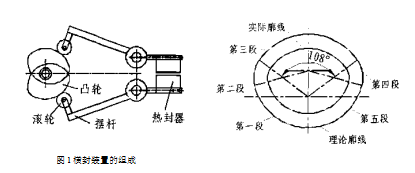
随着人们生活水平的提高,商品包装越来越受到人们的关注,这就促进了包装机行业的蓬勃发展。目前,包装机械已经成为我国的重要经济支柱之一,广泛的应用于各个行业。横封机构是自动包装机的重要组成装置,主要完成包装袋的横边热封。在传统的立式自动包装机中,横封装置主要由摆杆、滚轮、凸轮、热封器组成,如图1所示。由凸轮机构的结构特性可知,凸轮轮廓的优劣决定了热封器运动特性的好坏。不合理的凸轮轮廓不仅容易引起振动、噪声,缩短零部件寿命,还会影响封口质量,因此设计既能满足工作要求又具有很小冲击的凸轮轮廓是横封装置设计的重点。本文以某厂立式粉末包装机为研究对象,着重研究凸轮轮廓对包装机振动的影响。
1原凸轮轮廓分析
1.1凸轮轮廓曲面参数
由于横封装置的左右凸轮机构是对称的,在此仅对其中一组凸轮机构进行研究。如图2所示,原凸轮的轮廓曲线由五段圆弧拼接而成,第一段与第二段弧线构成凸轮的推程,笫三段为凸轮的远休,第四段和第五段构成凸轮的回程。这种几何凸轮虽然加工方便,但动力学特性较差〔七该凸轮的轮廓曲面参数如表1所示。
1.2凸轮的运动分析
根据横封装置的机构组成,经几何分析后可得岀凸轮轮廓各段圆弧对应的摆杆角位移公式。以X代表凸轮圆心与滾子圆心之间的距离,单位/mm;以S代表摆杆的角位移,单位/rad。
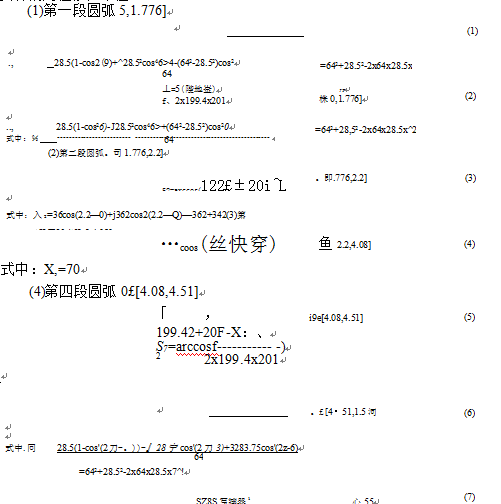
式中:X,=36cos(4.51-6»)+伽cos"(4.51-0)-36。+34,(5)第五段圆弧。式中:孑28竺3(22))+仙.5吳3部埋83.75如(23)/64押+2&宁_2x64x28.5x
1.3摆杆角位移、角速度和角加速度在MATLAB中的图像
对式1~7求导即可得到摆杆的角速度和角加速度公式,导入MATLAB中即可绘制摆杆角位移、角速度和角加速度的图像。MATLAB绘图的实质也是根据步长和公式取有限的节点进行计算得岀函数值,然后用光滑的曲线连接各点坐标得出整条曲线团。由于索取点数比较多,因此所得图像具有较高的精度,可以
满足工作的需要。已知凸轮的转速ty=80r/min,将O=M代入公式(7)中得到角位移、角速度、角加速度随时间变化的图像,如图3、4、5所示。
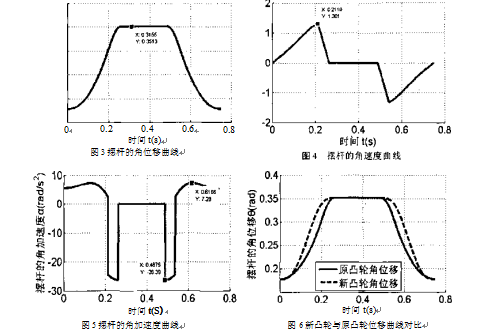





图4中,摆杆角速度连续但无平滑过渡,存在速度的急剧变化,产生很大的冲击。图5中,摆杆角加速度存在突变,致使惯性力也存在突变,产生柔性冲击,引起包装机振动。另外,图5中正负角加速度差值较大,回程中的加速度过大容易引起凸轮和滚轮之间的接触力变化,产生振荡甚至相互脱离,产生振动和噪声。
2凸轮轮廓改进设计
2.1摆杆运动规律的选择
在凸轮机构中,从动件常用的运动规律有多项式运动规律和三角函数运动规律以及二者的组合,根据不同的工作要求选择不同的运动规律。热封装置中,凸轮转一圈,热封器张合一次。工作过程只要求凸轮转过一定角度,摆杆完成一定的行程,考虑到包装机的包装速度较快,应使摆杆在启动和停止时具有较小的角速度和角加速度,减小热封器对包装机的冲击,因此选用正弦运动规律。正弦运动规律的加速度变化连续平缓,在始、末点无柔性冲击。
2.2摆杆的运动方程
回程运动方程(正弦加速度)
上式中: n—凸轮的角速度,n=8.3776rad/s
2.3改进后的凸轮轮廓与原凸轮轮廓的比较
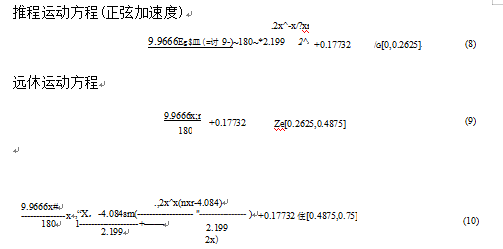
根据原热封机构的运动方程和改进后的热封机构运动方程在MATLAB中进行编程,绘制二者的图像,直观的显示二者的变化趋势及二者的区别,所得图像如图6、7、8所示。
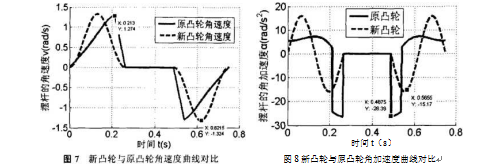


图6、7、8中,实线代表原凸轮的特性,虚线代表改进后凸轮的特性。如图6所示,两条曲线的形状基本一致,旦最大值和最小值都相同,说明改进后的凸轮能够满足热封机构的工作要求。图7中,实线呈折线形状,说明頂机构中摆杆的角速度在折弯处变化比较剧烈。虚线不但连续而且光滑,说明新机构中摆杆的角速度变化比较平缓,产生的冲击比较小。原热封装置中摆杆的最大角速度为1.301rad/s,而新热
封装置中摆杆的最大角速度为1.325rad/s,二者的差距很小。图8中,原机构中摆杆的最大角加速度为26.39rad/s2,新机构中摆杆的最大角加速度为15.86rad/s2,明显比原来小很多,而且角加速度变化光滑连续,无冲击存在。由图7、图8可以明显的看出,改'进设计后的凸轮机构具有更加优越的运动特性。
2.4改进后的热封凸轮轮廓曲线
根据文献,得到摆动滚子推杆盘形凸轮的轮廓方程为
 x=as\n8-Isin(5+5+^0)y=acosZ-7cos(3+s+佐)
x=as\n8-Isin(5+5+^0)y=acosZ-7cos(3+s+佐)
式中:
a一凸轮轴心与摆杆轴心之间的距离;
I—摆杆的长度;
8-凸轮转过角度;
s—摆杆的角位移;
代一摆杆的初始摆角。
将式8、9,10代入式11中即可得到凸轮轮廓的表达式。利用MATLAB的绘图功能,根据所得公式,分段生成新凸轮的轮廓曲线,如图9所示。
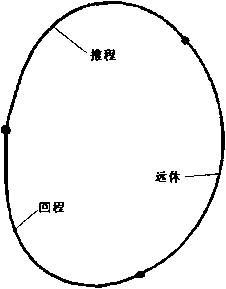
图9改进后的凸轮轮廓
3结束语
对原有热封机构进行结构分析,推导出凸轮轮廓曲线与摆杆转角之间的数学关系式,运用MATLAB软件进行仿真,直观的反映出原有凸轮的缺陷。根据热封装置的工作要求,选取正弦加速度运动规律作为摆杆的运动规律,设计出了更加优越的轮廓曲线。由于采用解析法,绘制的轮廓曲线精度比较高,而且当凸轮机构的参数发生变化时,只需修改表达式中的参数值即可得到新的轮廓曲线。
文章来源于网络转载,侵删
 ×
×



