

来源:网络转载更新时间:2020-08-10 10:43:22点击次数:4531次
0前言
伴随着工业生产自动控制系统向智能化发展趋势,近些年数显式重量传感器被开发设计并已获得运用,数显式重量传感器可由微控制器对基本桥路开展补偿和调节,开展离散系统、落后、应力松弛等特性的调整,进而提髙重量传感器的特性⑴。而数据秤重模块将数据重量传感器置放在重量传感器內部的A/D变换和解决电源电路在传统式的仿真模拟重量传感器外界完成,并能够 设计方案系统总线插口,完成数据变送作用。既保存了数字模拟重量传感器的综合性性能参数,又具有总体型数据重量传感器的全部特性和作用,另外最大限度地改进了A/D变换电源电路的办公环境。能够 在对原来称重设备未作一切更改,又不拆换重量传感器的前提条件下,根据数字式重量传感器模块,变仿真模拟称重设备为数据称重设备,是对传统式的称重设备开展智能化更新改造的一条捷径。
1称重设备基础构造
C8051F350內部有一个全差分信号24位Sigma-Delta模/数转化器,具备在片校正作用,并且内建了温度感应器。其32脚位的LQFP封裝,8mmx9mmX1.6nun的规格,那样就可以使数据接线端子(秤重模块)的容积和净重降到最低,并且集成化的可编程控制器増益、性能卓越A/D和温度感应器降低了数据接线端子內部电源电路的元器件数和点焊,提升系统软件的可靠性和准确性⑵。搭建数据秤重模块的系统结构图如图所示1所显示。
1.1提升称重精密度的六线制信息反馈
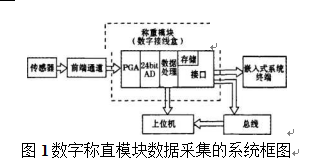
图1数据称直模块数据信息釆集的系统结构图
当感应器电桥电路转变时,具体载入到电桥电路两边的工作电压会有一定的转变。因而,在高精密精确测量及远距离精确测量时多选用六线制的感应器。运用C8051F350集成ic多路仿真模拟键入作用,对六线制的重量传感器的鼓励端因同轴电缆电阻器以及溫度飘移造成的輸出偏差开展赔偿,提升了测量精度。如图2所显示,EXC*和EXC一为鼓励工作电压輸出,SEN*和SEW为意见反馈数据信号,1NP‘和INP-为音频信号键入。MAX4618是8选2开关,将必须收集的音频信号入选C8051F350的模拟量输入键入端。能够 待称重采样平稳后再开展一次SEN,和SEN-端意见反馈取样,进而获知电桥电路具体载入的工作电压,随后再对以前的釆样結果开展数据解决。
图2中的秤重模块的插口适配了四线制的感应器。当联接六线制感应器时,光耦继电器AQW212将意见反馈端与地分隔,使意见反馈工作电压差分信号连接调养电源电路,并根据MAX4618最后传送到C8O51F35O的AIN0脚位。当联接四线制时,SEN*和SEN'脚位沒有意见反馈工作电压键入,这时候根据秤重方式挑选,将AQW212开启,进而U2和U3的正相键入根据10kfl电阻器接地装置。不然,若U2,U3的键入悬在空中,很有可能导致FO端工作电压饱和状态,进而造成加在多通道电源开关MAX4618的工作电压过高,长期性应用四线制会导致集成ic的毁坏。另外因为AQW212的光耦隔离功效,维护了操纵数据信号P0.3和操纵模块C8051F350。
1.2高特性阻抗键入
为提升秤重模块的输入电阻,进一步提高测量精度。C8051F350內部设定了两个单独的键入油压缓冲器。每一个键入都是有一组(两个)油压缓冲器,当肯定脚位键入工作电压坐落于检测范围的低半一部分时应用low键入油压缓冲器,当肯定脚位键入工作电压坐落于检测范围的高半一部分时应用high键入油压缓冲器。进一步提高了数据信号键入的特性阻抗,确保了精确测量的精密度。如图所示3所显示,是差分信号正键入安全通道的油压缓冲器构造,负安全通道和正安全通道的构造相近。
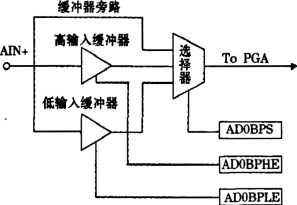
S3C8051F350正键入安全通道油压缓冲器框架图
在取样应先试取样一次,ADOBPHE和ADOBPLE置1使能,ADOBPS=00,应用油压缓冲器旁通。当AIN+键入超出事前承诺的一个值时,ADOBPS=10,进而挑选高键入油压缓冲器,随后开始后续的釆样工作中。一样,AIN+键入低于该承诺值时,ADOBPS=01,进而挑选低键入油压缓冲器。
2数据赔偿
搭建高精度检测系统除了在硬件配置上开展设计方案,还必须根据手机软件方式开展数据赔偿。
式中站为当今取样時刻MsZ;时变指数i(A),£=0,l,2・",p,用于表明仿真模拟键入安全通道数据信号转换电源电路,A/D转化器电源电路中存有的零点漂移、溫度飘移等要素对I/O特点的危害为仿真模拟取样键入,为A/D转化器数据量輸出。一般可用阶PW2。
因而针对一组键入可写出以下引流矩阵,系统辨识的反向实体模型。
因为在系统辨识时,即便是规范工作电压键入也存有波浪纹或者安全通道中耦合进去的一些任意影响。因而,解决规范键入工作电压数次取样,那样键入工作电压的均值才更贴近指标值,进而因而改变式⑵为匕性)理论上,当样版充足大时,其平均值能够 当作期待,那样KW才更贴近规范键入工作电压。若实体模型取多阶,则如图2所显示,在MAX4618的键入挑选端连接1.9V和0V的标准工作电压,在开展系统辨识的情况下各自选通并釆样,再由式(4)求出二阶反向实体模型。除此之外,因为七*)是时变指数,当采样频率一定时,样版越大,耗用的時间越长,时变指数更改就很有可能越大。这时其期待和具体值中间反倒区别更大。因而,应当每一次秤重前后左右都必须1次系统辨识,且在新领域下应当做一次飘移检测,以明确每一次秤重精确测量平稳的時间,这一時间既要确保每一次秤重抽样的无偏性,又应考虑到系统软件实体模型飘移的危害,以较大很有可能地确保精密度。
3手机软件步骤
在电脑编程时,关键的汇编程序模块有秤重方式设定模块、系统软件鉴别模块、釆样模块、数据处理方法模块、和后端开发人机交互模块,进行一次秤重个人行为的流程图如图所示5所显示。
4结语
该秤重模块运用内置24位AD转换器的混和数据信号单片机设计C8051F350,融合六线制感应器的特性,设计方案了适配四线制和六线制的感应器输入通信接口。并运用反向系统软件模型的观念开展数据处理方法,补偿系统软件的离散系统偏差。其高精度、功耗和便于安裝拓展的特性在传统式仿真模拟感应器的更新改造上面有较高的实际意义。
文章来源于网络转载,侵删
 ×
×



