

来源:网络转载更新时间:2020-07-21 15:09:07点击次数:3354次
包装机是用来包装商品的专用设备,包装规格600mm,,压力16000kg,行程12000mm,包重60kg.因此.包装机主压板的行程、压力、速率等方面的运动性能便是该机器设计成败的决定性因素.
用于该设备的六面体箱体及各种商品的称重等方面的工作由其他工序进行,这里所述仪为主压板的运动,即主执行机构的选型原则及其运动规律。
1.1工作原理
图1为该机构的工作原理示意图。它是通过电动机件1经传动系统(构件2—6),驱动主执行机构——螺旋-菱形四钗链杆组合机构(构件7,8.8'.9,10和机架组成).迫使主压板(构件12)向下位移,将被包装商品挤压成型为所需规格(挤压成型后的商品另有包扎定型方法.这里从略).然后利用倒顺开关操作控制电动机停机或反转,使主压板提起,完成一次包装的行程运动.
图1中,构件11为称重小车.又叫包装箱,根据不同商品所需规格和重量的不同.可以更换箱体11和构件10.
图1中.当主执行机构的丝杠轴件7(其左右两段分别制成左右螺纹)受到转矩作用后而正反转时,正反螺纹的左右二螺母件8和8',便可同步分离或靠拢,与此同时.菱形四皎链杆件9便迫使件10作下上的直线往复运动。
12常用机构学的几种型式
把现有机构学理论进行系统化,对可作直线往复移动的机构采用罗列比较法,并进行可行性计算,将有助于选择最优的机构型式.常用的将旋转运动转换成直线往复移动的机构有:1)高付机构,如各种凸轮机构和齿轮齿条机构,2)低付机构,如曲柄滑块机构、正弦机构和四杆机构;3}低付机构与高付机构的组合,如曲柄揺杆机构与齿轮、齿条机构组合等’
13机构选型的一般原则
正确进行主执行机构的选型,在许多情况下对提高机器性能具有重要作用,同时还会常来良好的经济效益。一般应考虑如下原则:
1-31满足机器的运动规律要求,是保证机器性能的一个重要方面.当不同的机构能实现同一运动规律时,在一般情况下,应尽可能选用功率消耗少、且构件数目少和运动数目少的机构。
13.2承受载荷较大的机器「,一般不宜采用凸轮机构,而宜用增力倍数较大的连杆机构.并应在受载区间内保证有较大的传动角,以利机构具有良好的传力性能。
 |
14主执行机构的选型
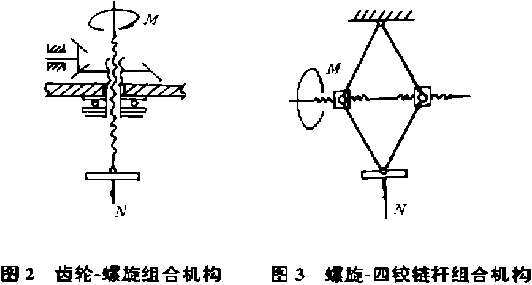
按照电动和手动两用包装机的要求,参考机构的选型原则,宜选用承载能力高、制造安装容易、功率消耗低、效率高、行程大压力大、结构简单、无漏油汚染、工作可靠的机构°经多种机构进行比较,初歩选定为图2所示齿轮-螺旋组合机构,或图3所示螺旋-菱形四校链杆组合机构.
在不考虑摩擦力和惯性力的情况下,对图3和图2所示主执行机构中主压板压下的速度s压力N.加速度口和位移S(行程)等,分别进行分折、方案比较及讨论如下。
2.1主压板压下时的速度v '
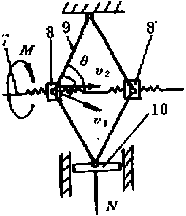
对图3所示机构,由图4力学模型分析可知
|
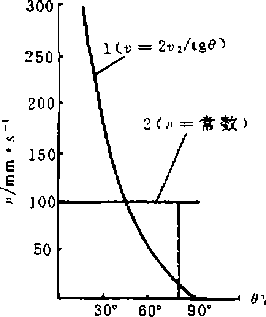
图5运动线图 |
|
„2nn 2v¥ P=_M.n=N— 得到'=謂0。=陞灣坝。 |
![]() 由式①可知’当e角由9时,速度在理论上由8—0,即件10的速度随。角的増大而减小。当角较小时r值很大,此时正是尚未压紧商品的时候.正需要快速压下.以减少空行程和压力较小时的行程时间,以提高效率;而当接近90。时,件10受到的阻力N越来越大,此时正是主压板即将到位(例如(^80°,N2216000kg时)的时候,此时速度"很小,所以.所需功率P=N-u,其值较小,于是,即可选用较小容积。
由式①可知’当e角由9时,速度在理论上由8—0,即件10的速度随。角的増大而减小。当角较小时r值很大,此时正是尚未压紧商品的时候.正需要快速压下.以减少空行程和压力较小时的行程时间,以提高效率;而当接近90。时,件10受到的阻力N越来越大,此时正是主压板即将到位(例如(^80°,N2216000kg时)的时候,此时速度"很小,所以.所需功率P=N-u,其值较小,于是,即可选用较小容积。
由式①可知’当e角由。。亠9。。时,速度在理论上由8—0,即件10的速度随。角的増大而减小。当。角较小时r值很大,此时正是件io尚未压紧商品的时候.正需要快速压下.以减少空行程和压力较小时的行程时间,以提高效率;而当接近90。时,件10受到的阻力N越来越大,此时正是主压板即将到位(例如(^80°,N2216000kg时)的时候,此时速度"很小,所以.所需功率P=N-u,其值较小,于是,即可选用较小容量的电动机。
由图4力学模型可知,当丝杠轴件7由电动或手动输入转矩M时,主压板件10受到的有用阻力为N(包装商品的反作用力).则主执行机构为一平衡系统 图5所示为图2、图3两种机构的运动线圏,图中曲线1为图3所示机构的速度线图.直线2为图2所示机构的速度线圏。当图3中的•角达到80。左右时,曲线1的速度值远远比直线2的速度值低,所以’图3所示机构的功率消耗要比图2所示机构小得多。
图5中,曲线1为血=50mm/s时所作;直线2v=100mm/s时所作。
2.2主压板的压力N
式中w*=soxlOO
S——丝杠轴的导程。
由式②可知,当。角由0—90°时,N由。亠8,即主压板在压下的过程中,压力N越来越大,它恰好满足了包装商品时,压力越压越大的需要•
2.3主压板压下时的加速度a
由式④可知,行程S与,和sin。均成正比关系。结合图5可见,在正常情况下,图3所示机构要比图2所示机构的行程周期小得多,图2所示机构的压力和行程都受有较大的局限性。
对图2所示机构还可直接看岀.丝杠轴位移量过大(悬臂过大),主压板常因振动而引起左右摆动,常导致压坏下方的箱体;丝杠与丝母啮合处轴向力很大,必须使用止推轴承,均需集中润滑,于是,润滑油就会沿丝杠往下流,污染主压板下方的被包商品,这是禁忌;此外,从制造、安装、维修和造价以及机重、材料、可靠性和经济效益等方面考虑,图2所示主执行机构均不及图3优越,因而已渐被淘汰。
设计包装机的主执行机构时,考虑满足机器的性能要求,采用传统的罗列比校法,以定性和定量分析相结合的方法进行机构选型,是一种最为可靠和最为有效的方法。
本文源于网络转载,如有侵权,请联系删除
 ×
×



