

来源:网络转载更新时间:2020-07-09 09:59:32点击次数:3970次
1引言
在包装机械中,许多包装工艺过程需要冋歇运动来完成,如包装材料、产品及包装的输送,翻 转或转移,工作台的间歇转位等。我们设计的BX200 I雪糕包装机的间歇输送链道就是应用齿轮连杆机构即三轮四杆机构来完成的。
输送链道1将雪糕2送至推板3处时,由推板垂直拨入包装材料4中.热封包装。推板要把雪糕从链道上推入正在成型的包装 材料中,就需要链道在推板处把雪糕从链道推出 的这段时间内停止迅动。即要求输出链道做冋歇 运动。
实现间歇运动的机构有槽轮机构、棘转机构、 凸轮机构及三轮四杆机构等。但由于槽轮机构、棘 轮机构的结构、运动和动力特性的限制,它们的运 转速度不能很高,每分钟的间歇次数不能超过 1。0〜200次。否则,动载荷很大,冲击和振动很强
轻工心1998年 烈,可靠性很差,机构的工作准确度就难以保证。 而凸轮式间歇机构加工比较复杂,而且高速运转 的凸轮加工精度要求很高,装配调整要求也高。而 齿轮连杆机构加工方便、在高速运转中精度易于 保证,运转可靠。我们设计的雪糕包装机,速度达 200包/分,在连续运转中有瞬间的暂停,即暂停 时间比较短。因此采用齿轮连杆机构,也就是三轮 四杆机构来完成它的间歇运动。
它是由3个相互啮合 的齿轮1、3、5和一个曲柄揺杆机构ABCD组成 的复合机构。连杆2连接齿轮1、3的中心,连接齿 轮3、5的是插杆4。齿轮1偏心固联在偏心轴块6上,以键联结。 齿轮3自由地回转在连杆2上与摇杆4的连接轴 上。当齿轮1绕偏心轴6作匀速转动时,一方面通 过啮合使齿轮3转动,另一方面因为它是偏心安 装的,又通过连杆2使揺杆4摆动,所以齿轮5输 出的运动是两个运动的复合,是按一定规律变化 的有间歇的运动•这样就满足了输送链道间歇运 动的要求。
3机构的运动分析
设曲 柄摇杆机构中的曲柄AB = a.连杆BC = b,摇杆 CD=c,机架AD=d,齿轮1,3,5的节圆半径分别 为 rl式中:%、》、% 分别为齿轮5及杆2、杆4的角 加速度。只有在3s =。时,机构处于暂停状态,因 此,这种机构在起停瞬时角速度和角加速度都为 零,冲击、振动小
为了简化公式推导,假定r:=r,,则有:b=c=ri+r2
根据三心定理,齿轮5和齿轮1的相对速度 瞬心Pis位于瞬心线Pm、P°s的延长线的交点上, 则螺根据三角形的正、余弦定理求得:OA摇杆CD上分别装有齿轮3和5组成一个周
0)1 max a】 min
则齿轮5与作正转一停歇一反转一停歇的周期运 动,如图5的曲线C所示。
从上边b=c的条件下分析可知,在一定的条 件下,三轮四杆机构能够实现瞬时的间歇运动即 曲线B所示。在理论上齿轮5只是在270。的瞬间 停,但在实际机构中,在通常的制造偏差范围内, 间歇时间约等于齿轮1转过45。角的时间,即相当 于1/8周期。
4输出有一次暂时停顿的三轮四杆机构的设針
输出有暂时停顿也就是如图5的曲线B所 示,齿轮5有瞬时的停歇,也就是说此种机构在偏 心轴以姫的匀角速度旋转时,齿轮5在某一瞬时 有&=0
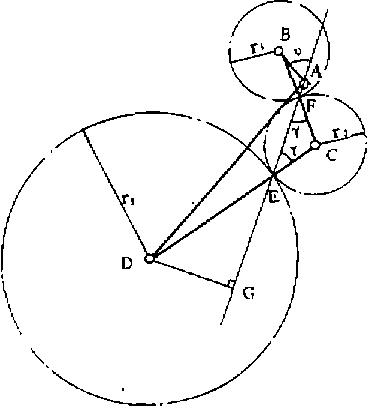
图5
图5所示为机构处于暂停的位置。在这个位 置不论齿轮1的角速度也为多大,而齿轮5的角 速度为零。条件是1、3齿轮的啮合点F,3、5齿轮 的啮合点E和输入轴A三点在一条直线上•
同为F点是齿轮1、3的相对运动瞬时中心 P“,E点是齿轮3、5的相对运动瞬时中心P35>A 点为齿轮1的绝对瞬时中心Poi.D点为齿轮5的 绝对瞬心P°s,所以当AEF共线时,A点就是齿轮 1和齿轮5的相对运动瞬时中心Pis的位置。
根据瞬时中心的定义,两个运动着的构件上 与相对瞬时中心位置一致的点的绝对速度相等, 而相对运动速度为零°所以齿轮5上位于A处的 点的速度应和齿轮1上的A点速度相等,而齿轮 1上的A点速度为零,即有齿轮5此时不动,速度 为零。
从作图可看出,在AD较大的情况下,在机构 运转过程中EF连线两次通过A点,即机构在一 个运动周期中有两次停歇。在AD较小的情况下, EF连线在机构的运转过程中始终不通过A点 (即EF与AD的交点总是在A点的一侧),那么 在EF共线且AD有一个最小值,机构才有一次 停歇,这就是我们要寻求的答案.
本文源于网络转载,如有侵权,请联系删除
 ×
×



