

来源:中国知网更新时间:2019-08-26 13:41:07点击次数:12589次
引言
传感器作为人机交流的工具之一 ,能够及时捕捉机器在运行过程中的各种信息, 为人们的下一步决策提供技术和理论依据 。同时在产品设计和参数研究方面,也能提供准确的技术支持。上个世纪国际一些大公司如波音公司 , 部分新产品已实现了无样机生产,这主要是传感器技术的应用。随着科技的进步 ,传感器的应用也越来越广泛。目前已渗透到各个领域 。以农业机械为例 ,黑龙江农垦系统近年引进的各种型号的拖拉机都装有不同种类的传感器 ,在力调节 、位调节和力位综合调节方面均由传感器直接控制 。充分显示了机器作业过程中的先进性和驾驶员操作的方便性。
1. 1测力传感器的组成
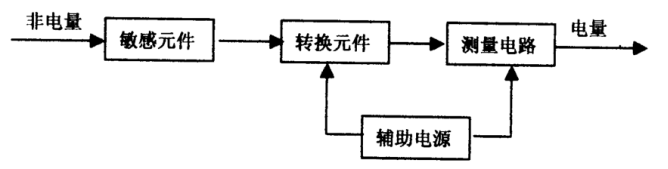
传感器的作用一般是将被测的非电量转换成电量输出 ,它主要由敏感元件、转换元件, 测量电路和辅助电源四部分组成。
1. 1敏感元件:在传感器中,主要作用是感受被测量的变化 ,同时将被测量变换成易于变换成电量的某一中间变量。如膜片式压力传感器 ,它的敏感无件是一个弹性膜片 ,其作用是将压力信号转变为膜片的变形,为下一步电信号的输出做准备。
1. 2转换元件:传感器通过转换元件将敏感元
件输出的中间非电量转换为可以被传感器利用的电量。它主要是利用某些物理的、化学的或生物的效应等来达到这一目的。如膜片式压力传感器的转换元件 ,它利用电阻应变效应, 也就是金属导体或半导体的电阻随着它所受机械变形的大小而发生变化的原理 ,将弹性膜片的变形转换为电阻值的变化。
2. 3测量电路:转换元件输出的电量常常难以
直接进行显示 、记录和处理, 需要将其进一步变换成可直接利用的电信号。完成这一功能的是测量电路。如应变式压力传感器中的测量电路是桥式电路, 它可以将应变片输出的电阻值转换成一个电压信号 ,经放大后即可推动记录装置和显示仪表的工作。
2. 3辅助电源 :有些传感器除电路电源外 ,还需一辅助电源提供给信号。这四部分的联系如图所示:
2 对测力传感器的基本要求
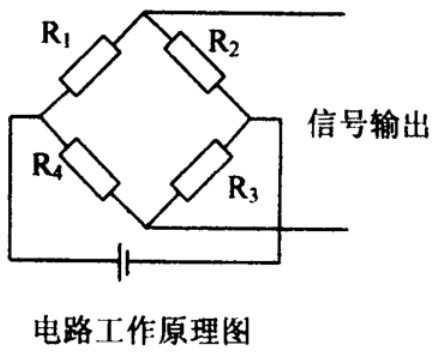
机械上使用的传感器型式多种多样, 但应用较多的还是电阻式传感器。电阻应变片式测力传感器内部电路一般是桥式电路 。电阻作为转换元件 。电阻阻值的变化最终以信号的形式输出 。因具有结构简单、线性和稳定性好 、输出精度高等特点 , 在实际中越来越受到重视。其采用的敏感元件是弹性测试元件,主体就是一个弹性体 。其中弹性体的结构形状与相关尺寸对测力传感器性能的影响极大。如果测力传感器的弹性体设计不合理, 无论弹性体的加
工精度多高 、粘贴的电阻应变片的品质多好,测力传感器都难以达到较高的测力性能 。因此, 在测力传感器的选择过程中, 弹性体的结构型式至关重要 。传感器的电路工作原理如图所示。
弹性体的设计基本属于机械结构设计的范围 ,但因测力性能的需要, 其结构上与普通的机械零件和构件有所不同 。一般说来 ,普通的机械零件和构件只须满足在足够大的安全系数下的强度和刚度即可 ,对在受力条件下零件或构件上的应力分布情况不必严格要求。然而 ,对于弹性体来说,除了需要满足机械强度和刚度要求以外 ,必须保证弹性体上粘贴电阻应变片部位 (以下简称 “贴片部位”)的应力(应变)与弹性体承受的载荷 (被测力 )保持严格的对应关系;同时, 为了提高测力传感器测力的灵敏度 ,还应使贴片部位达到较高的应力 (应变 )水平 。综上所述,测力传感器的弹性体在选择过程中必须满足以下两项要求:
(1)贴片部位的应力(应变)应与被测力保持严格的对应关系;能够真实反映被测构件的变形情况 。
(2)贴片部位应具有较高的应力 (应变)水平 。及时反映出构件的受力情况。
为了满足上述两项要求 ,在测力传感器的弹性体元件选择方面 ,经常应用 “应力集中 ”的原则, 确保贴片部位的应力(应变 )水平较高 , 并与被测力保持严格的对应关系, 以提高所设计测力传感器的测力灵敏度和测力精度。
2. 2改善应力 (应变 )不规则分布的 “应力集中”原则
在机械零件或构件的测试过程中, 通常认为应力(应变)在零件或构件上是规则分布的 , 如果零件或构件的截面形状不发生变化 , 不必考虑应力 (应变)分布不规则的问题 。其实, 在机械零件或构件的设计中 ,对于应力 (应变)不规则分布的问题并非不予考虑 ,而是通过强度计算中的安全系数将其包容在内了。
而对于测力传感器来说, 它是通过电阻应变片测量弹性体上贴片部位的应变来测量被测力的大小。若要保证贴片部位的应力 (应变 )与被测力保持严格的对应关系 ,实际上就是保证在测力传感器受力时,弹性体上贴片部位的应力 (应变 )要按照某一规律分布,即按照被测构件的变化规律分布。在实际应用中,对于弹性体贴片部位应力 (应变 )分布影响较大的因素主要是弹性体受力条件的变化。弹性体受力条件的变化是指当弹性体受力的大小不变时, 力的作用点发生变化或弹性体与其相邻的加载构件和承载构件的接触条件发生变化。如果在弹性
体结构设计时 ,未能考虑这一情况 ,就可能造成弹性体上应力 (应变)分布的不规则变化 。下面以筒式测力传感器为例加以说明。
当筒式测力传感器上、下端面均匀受力时,在弹性体贴片部位的整个圆周上应力 (应变 )的分布是均匀的。当上 、下两个端面上受力情况发生变化后,力在两个端面的作用情况不再是均匀分布的, 这时弹性体贴片部位圆周上应力 (应变 )的分布情况就难以预料了。如果筒式测力传感器弹性体的高度与直径之比在一定范围之内 (如小于或等于 2. 5), 弹性体贴片部位圆周上的应力 (应变 )基本上还是均匀分布。但是 ,在实际应用中 ,受传感器外形尺寸的影响 ,筒式测力传感器弹性体的高度与直径之比有时大于 2. 5, 弹性体贴片部位圆周上应力(应变)就会发生不均匀分布 ,而且不均匀分布的情况随弹性体受力情况的变化而改变 。在这样的条件下, 弹性体贴片部位的应力 (应变 )与被测力往往不能保持严格的对应关系,将造成明显的测力误差。
为了减小由于弹性体受力条件的变化引起的测力误差,有些传感器在设计上采取在筒式测力传感器弹性体上增加贴片数量的方法 , 尽可能将弹性体上贴片部位圆周上应力 (应变 )分布不均匀的情况测量出来 。这样的处理方法有一定的效果, 可以减小弹性体受力条件的变化引起的测力误差。但这种方法毕竟是一种被动的方法 ,因为增加的贴片数量总是有限的 ,还是很难把弹性体上贴片部位圆周上应力(应变)分布不均匀的情况全部测量出来 , 测力误差虽能够减小 ,但其程度也不够显著。
弹性体受力条件的变化引起的测力误差的实质是弹性体贴片部位圆周上的应力 (应变)的不规则分布, 如果能使弹性体贴片部位圆周上的应力 (应变 )分布受到一定条件的约束 , 迫使贴片部位的应力 (应变 )按照某一规律分布 ,因而使得弹性体贴片部位的应力 (应变 )与被测力基本保持严格的对应关系, 由此来减小因弹性体受力条件的变化引起的测力误差。将是很好的举措。对于筒式测力传感器来说, 在承载强度足够的条件下 ,如果将弹性体贴片部位圆周上不贴片的部位挖空 ,使得应力只能在未挖空的部位分布 ,大大改善了应力 (应变)不规则分布的情况。或者说,应力(应变)的不规则分布仅仅限于未挖空的部位, 并且其不规则分布的程度不会很大。因此 ,在未挖空的部位粘贴电阻应变片 ,就能使测得的应力 (应变 )与被测力基本保持严格的对应关系 。
上述处理方法实际上出于这样一个原理 :通过某种措施,使弹性体上的应力 (应变 )集中分布在便于贴片检测的部位,实现测得的应力(应变)与被测力基本保持严格的对应关系 ,以保证传感器的测力精度。笔者曾用上述方法对筒式测力传感器进行改进 。测力精度明显提高。
2. 3提高应力(应变)水平的应力集中原则
若要测力传感器达到较高的灵敏度, 通常应该使电阻应变片有较高的应变水平, 即在弹性体上贴片部位应该有较高的应力 (应变 )水平 。
实现弹性体上贴片部位达到较高应力 (应变 )水平有两种常用的方法:
(1)整体减小弹性体的尺寸, 全面提高弹性体上的应力(应变)水平 ;
(2)在贴片部位附近对弹性体进行局部削弱 ,使贴片部位局部应力 (应变)水平提高 ,而弹性体其它部位的应力(应变)水平基本不变。
以上两种方法都可以提高贴片部位的应力 (应变 )水平 ,但对弹性体整体性能而言 ,局部削弱弹性体的效果并不影响测试结果。因为局部削弱弹性体既能提高贴片部位的应力 (应变 )水平 ,又使得弹性体整体保持较高的强度和刚度 ,有利于提高传感器的性能和使用效果。
局部削弱弹性体提高贴片部位应力 (应变)水平的原理是:通过局部削弱弹性体 ,造成局部的应力集中 ,使得应力集中部位的应力 (应变)水平明显高于弹性体其它部位的应力水平, 将电阻应变片粘贴于应力集中部位,就可以测得较高的应变水平。
局部应力 (应变 )集中的方法在测力传感器的设计中经常被采用, 尤其在梁式测力传感器 (如弯曲梁式和剪切梁式测力传感器 )的弹性体设计中被广泛应用 。局部应力 (应变 )集中方法应用较为成功的当数剪切梁式测力传感器。剪切梁式测力传感
器是通过检测梁式弹性体上的剪应力 (剪应变 )实现测力的 。
3 新技术在传感器方面的应用
3. 1新材料、新工艺和新技术的开发应用
半导体材料在敏感技术中占有较大的技术优势, 半导体传感器不仅灵敏度高 、响应速度快、体积小、质量轻 ,而且便于集成化 ,仍将占有主要地位 ;以一定化学成分 、经过成型及烧结的功能陶瓷材料 ,其最大特点是耐热性 ,在敏感技术的发展中具有很大的潜力;同时将半导体的精密细微加工技术 、静电封接技术等应用在传感器的制造中 , 可极大提高传感器的性能指标 。
3. 2传感器发展的集成化、多维化 、多功能化和智能化
采用集成加工技术 ,将传感器的各部分制作在同一个芯片上, 从而使传感器具有了体积小 、质量轻、生产自动化程度高、制造成本低 、稳定性和可靠性高 、安装调试时间短等优点 ;使用电子扫描技术,将多个传感器单元做在一起, 就可以研究多维空间的问题,如 CT技术等 ;智能化传感器还能将数据的采集 、存储 、处理等一体化,从而实现其多功能化 。
4 结束语
随着科技的进步,传感器的发展将是日新月异、突飞猛进 ,其发展趋势也将是各学科之间的相互交叉、相互渗透和相辅相成。由于其结构型式的和原理的不同 ,其功能和数据传输的特点也不一样,在使用时应根据不同情况进行选型。在测力传感器的选型和设计方面 ,如果能自觉地按照上述原则 ,对弹性体进行结构设计, 就能够收到提高测力传感器的测力精度和测力灵敏度的良好效果 。在机械的自动化应用方面有一定的积极意义 。
摘于中国知网,如有侵权请联系删除
 ×
×



