

来源:网络转载更新时间:2020-09-10 11:42:14点击次数:4003次
0引言
为了解决皮带秤的称重辐受力下沉时,产生皮带张力问题。一般是通过提高称架的刚度来减小皮带张力,这样会使皮带秤变得笨重。釆用阵列式皮带秤能够减小皮带张力、温度湿度的变化对称重精度的影响。该阵列式皮带秤系统釆用ARM7微控制器,针对滤波电路存在的稳定性、温漂等问题,设计出一种有效的低通滤波结构,采用了稳零式的仪表放大器和低噪声低温漂的24位ADC转换器,并对测速脉冲信号进行硬件滤波,从而有效提高了皮带秤的称重精度⑴。
1皮带秤的称重原理
动态计量秤积算器在物料输送过程中自动、连续的完成对物料流量的测量。这是通过动态釆集皮带秤架上的8个称重传感器和1个速度传感器,由单片机对这些数据进行处理从而完成物料的动态计量。为了测得在一段长度(或时间)内带送物料流的总累计值,可以釆用积分法计量原理来计算⑵。
在邛寸刻的计量段内,有物料通过时,可以测得该处截面的的物料重量分布和输送带的速度,二者的乘积就是皮带输送机的瞬时物料流量,在一段时间内对Q3进行积分,得到这段时间内的物料累计重量G
2皮带秤硬件电路设计
2.1嵌入式微控制器
皮带秤要实现八通道重量数据的并行采集、测速、通讯等功能,外围电路比较复杂。内部要进行瞬时流量和总累计量的计算,运算量很大。如果采用单精度的浮点数进行运算,在总累计量很大的时候,会出现数据累计不进去,导致数据的丢失的现象。工业现场中的大型设备的瞬时启动停止产生了强烈干扰,要求控制器具备很高的抗干扰能力和稳定性。所以釆用LPC2142微处理器,能够满足实际的需要。
LPC2142是支持实时仿真和嵌入式跟踪的16/32位ARM7TDMI-SCPU的微控制器,具有2个32位的定时器/计数器、6路输出的PWM单元和看门狗,2个工业标准的UART、2个1气接口,1个SPI和SSP,1路10位ADC、1个10位DAC、45个通用1/0口、9个边沿或电平触发的外部中断,内置16KB的静态RAM和64KB的片内Flash,通过PLL可以实现最大为60MHz的CPU操作频率,小型LQFP64封装,功耗很低⑴。可以实现很高的指令吞吐量和实时的中断响应,丰富的I/O口,也有利于以后硬件功能的扩展。
2.2滤波电路的设计
称重传感器输出的是0~8mV的电压信号,在进入仪表放大器之前,通过滤波来提高信号的抗干扰能力。
在无源低通滤波的基础上,设计出了一种更加有效的滤波电路的结构,如图1所示。差分信号通过Rag右端进入系统。由电阻R”、R23和电容Cm9、C|50组成了对地低通滤波结构,主要滤去差分信号中的高频噪声。2个并联涤纶电容Cw、cm,它们能够很好的衰减掉差模噪声。由高精密电阻为、电和粗电容C"3又组成了一个低通滤波结构,滤掉了截至频率以上的信号;最后经过涤纶电容C“、c%衰减掉了共模噪声,这时差分信号才输入到仪表放大器中。
图1滤波电路
釆用对称结构的低通滤波器,能够使得差分信号在传输过程中受到同样的损失,保证线路的平衡。当电阻和电容G”的值釆用如图1所标出的数值时,算出低通滤波器的截止频率A=72.38Hz⑷。
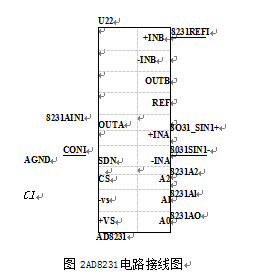
2.3仪表放大器(AD8231)
该系统称重传感器输出的是一个mV级的差分信号,极易受到工业现场噪声的干扰,因此不能远距离传输。必须先经过仪表放大器的放大,才能进行ADC转换⑷。
釆用的AD8231是一款利用自动调零技术制作的稳零式精密仪表放大器。电路结构如图2所示。
AD8231可以通过数字或引脚编程选择增益,最大为128。当增益G=1时,共模抑制比(CMRR)为80dB,共模抑制比随增益提高而增加,最高可达HOdB.输入偏置电压的最大漂移最大为50nV/T,可以有效改善皮带计量秤数据釆集的温漂性能。同时,AD8231具有关断功能,可以对八通道称重传感器信号进行放大,从而避免了在使用多路模拟开关带来的导通电阻和漏电流的问题。
2.4AD釆集模块
要达到比较高的测量精度,需要釆用高分辨率的ADC.AD7190是一款A-£型,转换速率可达4.8kHz,分辨率达到24位的A/D转换器。以ADC转换器为核心的硬件结构如图3所示。
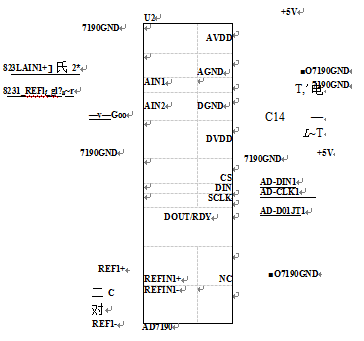
在确定AD转换器的转换速率时,要考虑系统的釆样速率,AD7190的釆样速率4.7Hz~4.8kHz之内。AD7190有效分辨率为24位,峰-峰分辨率为21.5位(gain=1,转换率为50Hz)。在满足需要的情况下,降低更新速率可以提高有效分辨率。
此外,ADC的有效分辨率还与可编程增益放大器的增益有关。该系统称重传感器的电桥激励电压为5V,其输出信号的共模电压为2.5V.称重传感器的输出信号(0~8mV)放大了128倍后,大约是1V左右,可设置的AD7190的增益只能设为
另外AD7190增益越低,其有效分辨率越高。
AD7190的4个数字接口的引脚/CS、SCLK、DIN、DOUT/RDY,通过隔离芯片ADuM1401和LPC2142应的I/O相连,利用SPI方式完成与微控制器的通信。8路的ADC转换器的DOUT/RDY端口跟LPC2142的引脚相连,并设置外部中断为低电平激活方式。当RDY变为低电平,就会进行中断服务处理。
把AD7190的参考电压输入端口REF1+、REF1-直接连接到称重传感器反馈激励电压,这样使得ADC转换结果跟AD7190的参考电压无关,这就是比率激励测量法的思想。能够用一般的基准达到高精度的ADC转换。
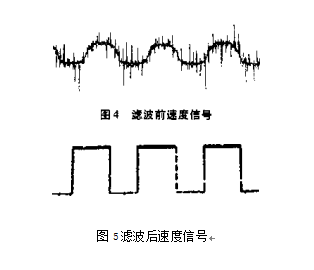
2.5测速模块
皮带秤的滚轮转动起来,通过光电编码器会产生速度脉冲信号,通过光隔TP521,除去速度信号上的毛刺,在经过施密特触发器74F132进一步去掉毛刺,最后由单片机进行处理⑷。当LPC2142的外部中断输入设置为边沿激活方式,就可以通过中断对输入的脉冲数进行处理。未经过滤波的速度脉冲信号,如图4所示。从图可以看出这时杂波的幅值很大,很容易导致逻辑电平的错误。釆用了施密特触发器后,提高了噪声容限,基本滤掉了速度信号中的杂波,输出的速度方波信号如图5所示
3抗干扰技术
3.1硬件抗干扰措施
在实际的应用中,传感器离控制器都有一定的距离,这时信号传输线的漏电阻,损耗电阻和分布电容会降低电路的共模抑制能力。采用六线制接法,就是把供桥激励电压的反馈电压作为ADC转换器的参考电压,并且使用屏蔽电缆作为传输线,可以有效的减小外界噪声的干扰⑷。
在电路板布局时,强电和弱电,模拟电路、数字电路都要分开'句。电源模块上面的+5V和+15V,分别通过SPX1117M3-3.3芯片和AD435芯片,分别为数字电路和模拟电路提供稳定的电源。
供桥的模拟地是从AC/DC电源模块的模拟地的根部直接引出去,可以避免其他模拟地的噪声干扰。在布线时,模拟地和AD7190的地单点接地,特别要防止走大电流的地线和ad7190的地线相互干扰。同时要保证所有电流的返回路径都尽可能地靠近它们到达目的地所走的路径⑴。而且,尽量加粗电源线和地线,并在电源线和地线之间,加1个106的铤电容和104陶瓷电容来去耦。同时输入8231_AIN1+、8231_REF1要釆用全差分模式,避免直接接地,减少地线噪声干扰。
3.2软件抗干扰措施
软件抗干扰措施主要釆用递推平均滤波法,就是先在单片机的缓冲区中存入N个数据,形成了1个长度为N的队列,然后每进1个采样值,就把最新的1个数据放在队尾,扔掉原来队首的1个数据,这样队列中始终有N个最新的数据。对这N个数据取平均值,就可以得到最新的滤波值。递推平均滤波法对周期干扰有良好的抑制作用,但对偶然出现的脉冲性干扰的抑制作用差。故它不适用于脉冲干扰较严重的场合,而适用于高频振荡系统囱。
4实验结果及分析
4.1阵列式皮带秤零点稳定性实验
在上位机的称重系统中,通过设定测速传感器的脉冲频率为50Hz,皮带秤空称跑4圈,去皮校称,测得的阵列式皮带秤的校称零点值,如表1所示。
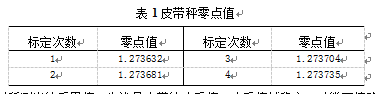
所谓零点指的是空皮带运行时所测出的重量值,也就是皮带的皮重值。皮重值越稳定,才能更精确的算出皮带秤的瞬时流量和总累计量。
当测速传感器输入的是工频脉冲时,皮带跑一圈的时间为48.5s,跑的圈数越多,测量的零点值会越精确。一般取4~5圈左右,就能满足实际的需要。这时皮带秤零点值误差精度在(7~8)Xi。-'表明阵列式皮带秤的零点值是很稳定的。但是由于皮带的不均匀性,因此这种误差是始终存在的。
4.2阵列式皮带秤称重实验及误差分析
在工业测试现场,上位机设置皮带机运行一圈的时间为48.5s,测得对应的速度为2.2m/s.并且设置皮带的张力最大值为1107kg,这样有利于减小皮带辐下沉的对称重的影响。然后
进行去皮、校称标定,再通过RS-485总线通讯,调取下位机的数据,并在上位机进行处理显示。在瞬时流量分别为200t、500t、l000t进行动态称重试验。根据物流流量的理论值和实际值,求得称重的误差(%),经拟合后的误差曲线。
3组试验的动态称重误差精度都在0.2%之内,每组试验的动态误差跟瞬时流量近似成线性关系。当瞬时流量为500t/h时,动态称重精度最高。根据式(1),当物流均匀流过,皮带速度稳定时,可以得出,物流流量的近似计算公式:
q=3. (2)
根据式(2)可知,当小皮带的速度恒定时,物流流量Q跟载荷分布g成比例关系。当流量。变大时,q就成比例增大。因此,单位长度皮带的承受的载荷变大,皮带的张力变大,误差被放大。在瞬时流量为500t/h时,对流量进行标定,得出的称重精度是最高的;而瞬时流量在200tj000t时,皮带的张力相对于500t/h的变化量分别为皿仏乌这样就使得称重误差变大。由于瞬时流量与动态称重误差近似成线性关系,可以通过软件补偿,进一步的提高动态称重精度。由于硬件电路、机械结构、外界环境等都会对皮带秤的精度产生影响,因此,要设计更高精度的皮带秤,需要全面的考虑这些因素。
5结束语
基于LPC2142微控制器的阵列式皮带秤,通过设计恰当的滤波结构,选择合适的仪表放大器和ADC转换器,并在硬件上对测速脉冲信号进行滤波,减小了杂波的干扰。经过的工业现场的测试,达到了很高的称重精度。而且LPC2142强大的功能,有利于将来网络接口等功能的扩展。测试结果表明这种阵列式皮带秤具有良好的使用价值。
文章来源于网络转载,侵删
 ×
×



