

来源:网络转载更新时间:2020-08-03 11:19:40点击次数:3907次
引言
巧克力包装机在高速情况下,需要通过凸轮连杆组合机构可以实现对巧克力的稳定推送和包装。但在实际运行中,其构件会发生弹性变形,对其整个组合机构的运动和动态特性都会产生较大的影响,使执行构件的实际位移、速度和加速度与设计位移、速度和加速度产生明显的振动偏差,因此在设计时,对组合机构进行动态特性分析是有必要的。故以巧克力包装机的凸轮连杆滑块组合机构为研究对象,将其看作一个质量系统,研究了运动过程中凸轮与推杆的动态响应,为凸轮连杆滑块组合机构的动态特性分析提供了一种简便直观的方法。
2凸轮连杆组合机构动力学模型的建立
通常情况下对凸轮-从动件系统可以简化为单自由度或者双自由度模型进行分析,就可以达到实际工程的需要呪但针对巧克力包装机的凸轮连杆滑块组合机构在高速运转的情况下,要保证在推送过程中运动状态平稳。因此需要简化成多自由度的动力学模型,使其计算结果更接近于实际工作情况。巧克力包装机的一个凸轮连杆滑块组合机构简图,它主要由凸轮轴、凸轮、随动器、摆臂、连杆和推杆等多个构件组成,如图1所示。
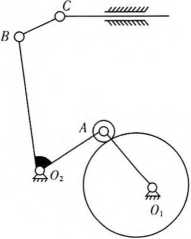
图1机构的结构简图
2.1动力学模型简化的研究
由于该组合机构凸轮轴支承的跨距较大,在高速转动中,使凸轮产生在平行于从动件方向的偏移会直接影响到从动件的运动规律。因此对该组合机构的动力学模型简化中考虑了轴的弹性变形对组合机构的影响。并根据构件弹性变形势能守恒的原理对相应的杆件进行简化%其简化模型,如图2所示。
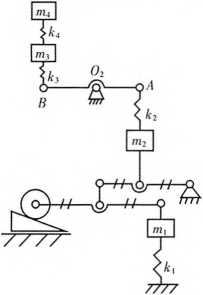
图2等效质量、刚度的简化模型
Fig.2SimplifiedModelofEquivalentMassandStiffness
简化了凸轮的等效质量为风(假设质心在回转中心),轴的等效刚度知。其余构件按照集中质量进行等效,其中,皿、灼为摆臂04端在0点的等效质量和刚度;叫、知为摆臂0B端在B点的等效质量和刚度;m,、知为连杆和推杆从动件在C点的等效质量和刚度。
组合机构考虑了自身阻尼对系统的影响,根据文献参考选择具有阻尼系数C的粘性阻尼。即:
C=2^y/(k-m) (1)
式中:6—阻尼因子,根据经验值可取g=(0.1~0.15);
一效刚度和质量。
2.2建立动力学模型
凸轮连杆滑块组合机构为几何锁合型的凸轮-从动件系统,假设随动器与凸轮是刚性的连接在一起,因此把4点的等效质量转化到凸轮上,同时通过摆臂40B的杠杆比把4端的所有等效质量和等效刚度转化到8端,最终简化成一个三自由度的动力学模型,如图3所示。
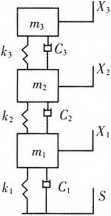
图3机构动力学模型的建立
Fig.3EstablishmentofMechanismDynamicsModel其相应的等效质量和刚度可由下列关系求得:
2 2
M}=(771)+m2)iK]=ki呉^
L()B L.r
M2=m3
M3=m4,K3=k4
3动力学平衡方程和仿真模型的建立
3.1动力学平衡方程的建立
根据图3所示的简化模型,由牛顿第二运动定律,建立的动力学方程平衡方程如下地
M]%!+(C]+C2)x]-C2x2+(K]+K?)叫-K?%2=K|s (2)
M2x2-C2x,+(C2+C3肉-Gx3-K2xt+(K2+K3)%2%3=0(3)
M3x3-C3x2+C3x3-K3x2+K3x3=0 (4)
转化成矩阵形式方程为:
MX+CX+KX=K}S(t)
00
M=0M20;
00M3
C】+C2—C2 0
c=-C2C2+C3_g;
0-c3c3
Kt+K2-K2 0
K=-K?K2+K3-K3;
0 -K3 K3
S(z)=(s,O,O);
X=(%(tx29x3);X=(xt9x29x3);X=(%jtx2,x3) (5)
式中:M、C、Kw於7效质量、阻尼和刚度矩阵;
%)wR女」当量激振位移矩阵。
3.2仿真模型的建立
根据上述动力学平衡方程建立了相应的Simulink仿真模
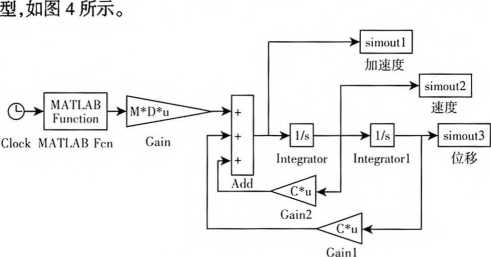
图4Simulink仿真模型
Fig.4SimulationModelinSimulink'
4实例验证
4.1推杆运动规律的选取
对如图1的凸轮连杆组合机构进行设计时,为了在高速运转过程中保证执行构件的定位精确和运动更加平稳。执行构件推杆釆用了修正摆线运动曲线规律,并逆向对凸轮轮廓曲线进行了设计。
其凸轮轴转速为450Hmin,其执行构件推杆的运动规律:推程为84mm,推程运动角为120。;远休g角为135。;回程为84mm,回程运动角为105。测可获得当量激诚位移s=(z)的变化规律。
4.2仿真结果及分析
针对上述模型的简化,对各构件进行了等效质量、等效刚度和阻尼参数的转化,如表1所示。
表1等效质量、等效刚度和阻尼参数
Tab.1ParametersofEquivalentMass,
StiffnessandDamping
|
等效质量(kg) |
等效刚度(107N/m) |
阻尼(lO'N.s/m) |
|
昭=0.525 |
K,=0.768 |
G=0.402 |
|
财2=0.102 |
^2=0.75 |
C0175 |
|
4/3=1.01 |
K3=10.2 |
B.1 |
(b)M(推杆C点)的加速度响应
图5构件的动态响应
Fig.5DynamicResponseofComponent
根据图3的动力学模型,并通过对执行构件推杆的运动规律选取和计算仿真,分别获得了质量块風(摆臂0』)的当量设计加速度和输岀加速度响应、必(推杆C点)的设计加速度和输出加速度响应,如图5所示。结果表明:高速运转的情况下,考虑了构件的弹性变形后,轴变形对凸轮运动有一定的影响,但影响不是很大。同时推杆C点的运动输出响应有一定的波动,尤其在加速度的最高点,波动范围比较大,但整个结果能满足实际情况的工作需要。
5结论
在考虑了构件的弹性变形后,建立了凸轮连杆滑块组合机构的动力学模型,并利用Matlab/Simulink软件对其进行了动态特性分析,得出的各构件的加速度输出响应与实际工况相差不大,验证了该结构设计和动力学模型简化的合理性。为凸轮连杆组合机构的设计和验证提供了一种简单直观的方法。
文章来源于网络转载,侵删
 ×
×



