

来源:网络转载更新时间:2020-07-24 10:18:18点击次数:4715次
引言
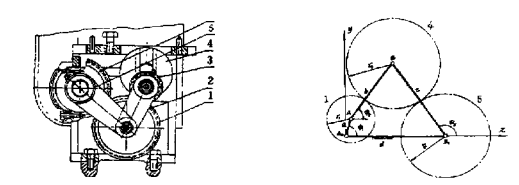
在轻工机械中,當可见三轮四杆机构用于实现短暂停號叫它具有便于调节,结构紧凑,制造方眞运转平稳等许多优点,例如上海益民食品一厂从德国弓I进的太妃博包装机中,驱动糖条输送部件就是用图所示的三轮四杆机构图中,1为齿轮,2为连杆,3为主动齿轮.4为盘形曲柄,5为摇杆,6为从动齿轮.
糖团被热轧成条狀后,连续被送入包装机进行切块,包装,在刀接触糖条而进行切糖时,希望搪条停止输送;切糖完毕,刀离开糖条后,又希望糖条快速送进.以此来保证糖块外形整齐,并有较高生产幫该三轮四杆机构能满足上述工艺要求.
1运动分析
三轮四杆机构运动简图如图2所示,是由齿轮】.4和5与曲柄插杆机构组合而成.齿轮1圆,沽连杆b构成转动副丄齿轮4松套在销轴B上,而齿轮5松套在轴8°上.
关于曲柄揺杆机构AtABBt的运动分析%有以下诸关系式;
2arctg[CF±VP^P-G1)/(£_£?)〔 (1)
=ardg[(F+应11可)/(E+ecos<>3)] (2)
式中劇 E=dacosC>1JF*—frsin<>l;
G=(£*+F1+c*-b^/lc
3、/to、=ajin(®(—e,)/csin(e,-®j) (3)
oij/coj=asin(。i—®s)/Asin(e.—6,) (4)
«j/tt>i™[b((al/(ol)1+ocosf^j—%)—c(cat/ta^'cosf®,—®2))/csin^j—0,) (5)
«2/co,=ktcoj/(o—flco^j—<>3)—Afaij/aij'coXe,—e,)]/&sin(e,—®j) (6)
现讨论从动齿轮5的运动规律.摇杆c、齿轮5和4组成一个周转轮系,按周转轮系传动比计算(
(r4/rs)Jcoi—(r4/rf)a>4 (7)
同理,在连杆如齿轮1和4组成的周转轮系中,一糾)/(%-糾)=-(J/J),即
-=卩+(j/嘴]糾—(,1(8)将式⑶代入式(7),得
as,-(rl/rf)a>l~(b/ri)(o1+(c/rJ)wJ (9)
将式(9)取定积分,当主动偏心齿轮1转过&时.从动齿轮5的转角为
。,-J:3,山H(,i/r,)J:3|dr_(3/r,)r%dr+ (10)
式中,7为主动偏心齿轮1转过2rt所需的时间.
在曲柄摇杆机构X/BS,中.当曲柄a(即齿轮1)转过如时,连杆3和摇杆c分别作一次周期性运•动.回到起始位置,故肌-J:cu/fQ,-ffwjd*-0,而e]-「切心2jt.代入式(1。)得
®s-f^
在原太妃糖包装机的三轮四杆机构中,因,,=2—故由式(11)可知,当也=2匹时,即当主动偏心齿轮1转过一周时,从动齿轮5转过半周.
将式(9)对时间取不定积分
(!,/七通-r$)0\+(c/r$)%+C (12)
。时♦e,。。.得c~(frj/fj)®,—(c/fjjOj.
当e,-。时的曲柄摇杼机构如图3所示.由图看出 fl
®a=arccos[(&1+(d—a)'—cJ)/2b(d—a)] V
-arccosTfi1-(tf-fl)1-c1)/2c(d-a)] 切
于是,可得式(12)中的积分常数 |A』 ]
C-(6/r()arccos[Cb'+ -o)J-c')/2b{d-o)]
-(c/r,)arccosK,‘一(d-a)'-e']/2戒-卽) S3
将式(9)每一项除以<0,.得
(Oj/cUj-(rf/r})-(b/ri)i
将式(9)对时间求导,得
(»,/<»:=-(6/rJUj/oj|)+(c/r,)(8^/co") (15)
2w与a的关系式
在三轮四杆机构中,主动齿轮1(即曲柄。)匀速转动一周期间,从动齿轮5作周期性不等速转动二次,令帝=旭,/叫]*,调节曲柄a的长度,可使从动齿轮5实现三种不同加的运动规律I*
显然,第二种运动规律是第一种运动规律和第三种运动规律的临界状态.在理论上,第二种运动规律只是出现一次瞬时停歇.但在实际机构中,由于齿轮啮合存在齿恻间隙,转动副中的间隙和构件的弹性变形等影响,在通常的制造偏差范围内,从动齿轮5的停歇时间约等于齿轮1转过45°角,即相当于1/8周期叫于是,第一种运动,齿轮5的停歇时间小于1/8周期,第三种运动齿轮5的停歇时间大于1/8周期.
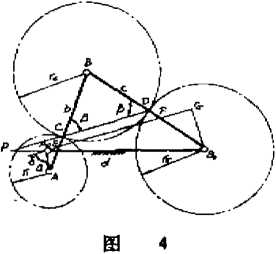
三轮四杆四机枸有w的瞬时位置如图4所示.齿轮5和齿轮1的相对速度瞬心p位于直线AtBt和CD的交点上.于是可得关系式+<1).式中,x^-PAa.
过A.点,作4.F平行CD分别交A方和%3于E和F点’再过七点,作%于G点,在相似三有形和《虬F中
B^/FD~d/x^-(1-W}/W
B.+FD=*r,将式(16)和(17)联立求解.=-WOr,.FD=r(-JTr,.
又因而=酒故ZE=rt-f¥rt.
在直角三角形A.B.G中
d1-(A^E+EF+FG)1+B^G
A#£AEcos^—acosS=(r(—Wr’JcosB—acxtsS£F«2(r4+F£>)cosP-2(r4+"rJccsHFGnB.F3S$*«(I—呼、cos。
召.—EqFsinBT1—W)rssinfi
角形4/君中,<3血<5=(七一咳rjsing.于是
acosd=J(rI—F»、)co$'g—(r(—Wr+a1
将式U9)和式(20)代入式卩8),得
d'=[0+c)co」-Jkcos'N-T'+a,f
式中,A=r(+rttC=r4+/*)>71=/*(—Wr}lU=(1—JK)r,.
将式01)対竦导,并令其等于零.化简后得
16bc(bc-TU)T\os*p一I6be(bc-TC/Xr‘一 +cffr,一/)=0
后(22用
cos^=[(T1- /2T1J{1+[(&+c)1-
k-U^/AyTbcibc-TU)
将式03)代入式(2顷化简后可得
a-J(TU)'-E’-Ui)('Tbc-->Fbc^TU)i/U(24)式《24)就是W和a的关系式.
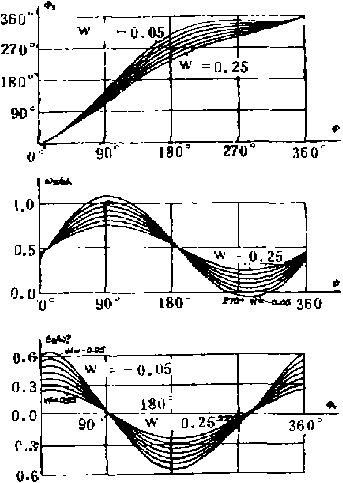
原包装机的三轮四杆机构中.齿轮模数均为E2mm,肯轮L的齿数2,-25,其节圆半径、-mZ,/2=25mm;齿轮4的齿数Z#-55,其节圆半径-=50mm;;齿轮5的齿数Z,-2Z,-50,其节圆半径rj=2r(=50mm;机架长度d=LL5mm.
取W=0.25,0.20,....-0.05.代入式(24)分别求出相应的曲柄长度a.再按《12)、(14)和(15).可绘出如图5所示从动齿轮5的运动线图.
由下式
yI=arcco町尸+/—(d—a)']/22>c)
,2t, ” (25)
=arccosfKJ+a)—(fc+c)]/2Z>c),
求岀7.和七.可得最小传动角丫皿MinlL
再以久为变量.分别以和偽/(3;|—皿羽为目标函数用黄金分割法搜索可再原机构的。/%1•和|%/如〔Tmax列于表I.
表1
|
W |
a |
|
I%/%」 |
応/3:匚 |
|
0,25 |
9385D0 |
67.62 |
0.075476 |
0.26433 |
|
0.20 |
12.01013 |
66.06 |
0.80690 |
0.32160 |
|
015 |
14.04612 |
64.50 |
0.85945 |
038074 |
|
0.10 |
16.09368 |
62.94 |
0.091243 |
0.44196 |
|
0.05 |
18.15357 |
6U9 |
0.96585 |
0.50549 |
|
0.00 |
20^2662 |
59.83 |
L01973 |
0,57157 |
|
-0.05 |
223136^ |
58J7 |
1.07403 |
0.64048 |
由表1可见,曲柄长度。调节得愈短.相应的皿愈大,电/气匸和椭/矶匚愈小,即运动愈平稳.但4愈短则呼意大.即停歇时间愈短.因此.只要停歐时间能满足工艺要求,尽可能取呼大些.国外引进的先逬机器中,往往取呼等于平均传动比之半"M,由式UU可知,原机构的平均传动比为0.5,故W可取到0.25.
3改进设计
保持原机构的机架长度d、齿轮I和5不变,取帝-0.25,Z4-S5,54,……,40,可由式律4)求得4.由式《25)求得丫皿,列于表2.
从表2可见,当Z.»•43,即=43mm时.。=8.96713版m.b=68mm,e93mm,其最小传动-80,47*较大.进一步保持1I5mm不变,取PF-0.25.Z,=25,24,….17,Zi~2Zl,ZT.=55,54,…,40,由式(24)和(25)可求得“和比较后可得:当Zt=18,Z.=54时,有煎大的丁皿=83.38'如表3所示.
|
|
表 |
2 |
表 |
3 |
|||||
|
瓦 |
a |
b |
c |
Ymin |
|
a |
b |
c |
|
|
55 |
9.98500 |
80 |
105 |
67,62 |
55 |
6.49578 |
73 |
91 |
82.0S |
|
54 |
9.91947 |
79 |
104 |
68.53 |
54 |
6.41874 |
72 |
90 |
83.38 |
|
53 |
9.85116 |
78 |
103 |
69.46 |
53 |
6.33767 |
71 |
89 |
81.99 |
|
52 |
9.77988 |
77 |
)02 |
70.43 |
52 |
6,225225 |
70 |
88 |
8C.38 |
|
51 |
9.70545 |
76 |
101 |
71.43 |
51 |
6.16212 |
69 |
87 |
78.71 |
|
S0 |
9.62766 |
75 |
100 |
72,46 |
50 |
6.06686 |
68 |
86 |
76,97 |
|
49 |
9.54628 |
74 |
99 |
73.52 |
49 |
5.96601 |
67 |
85 |
75,15 |
|
48 |
9.46107 |
73 |
98 |
74.62 |
48 |
5.85906 |
66 |
84 |
73.25 |
|
47 |
9.37177 |
72 |
97 |
7S.76 |
47 |
5.74539 |
65 |
83 |
71,27 |
|
46 |
9.27806 |
71 |
96 |
76.94 |
46 |
5.62433 |
M |
82 |
69.18 |
|
45 |
9J7964 |
70 |
95 |
78J7 |
45 |
5.49506 |
63 |
81 |
66.99 |
|
44 |
9.07613 |
69 |
94 |
79.44 |
44 |
5.35665 |
62 |
跑 |
64.69 |
|
43 |
8.96713 |
68 |
93 |
80.47 |
43 |
5.20799 |
61 |
79 |
6225 |
|
42 |
S.85220 |
67 |
92 |
78.84 |
42 |
5.04775 |
60 |
78 |
59.66 |
|
41 |
&73083 |
66 |
91 |
77J5 |
41 |
4,87430 |
59 |
77 |
56,92 |
|
40 |
8,60247 |
65 |
90 |
75.38 |
40 |
4,6«565 |
58 |
76 |
53,98 |
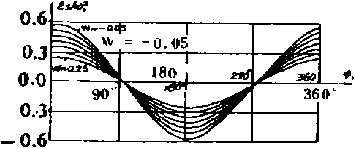
图6所示为改进后三轮四杆机构的运动线圈.在该机构中,机加长度d-l】5mm保持不交.齿轮1的齿数Z,-18.其节圆半径r,=18mm;齿轮4的齿数Z4=S4r其节圆半径仁-54mm;齿轮5的齿数Z5=2Z,=36,其节圆半径r,=36mm.连杆长度B==r,+r.=72mm,摇杆长度C=r.+r$=90mm.仍取W—0.25,0.20,•••,—0.05,可计算出企―伽/叽“和k,/也:L'列于表4・比较表4和表,相对应南T*、和|勺/蛆| 改进机构均优于原机构故改进三轮四杆机构运动更平稳,结构也更优化.
文章来源于网络转载,侵删
 ×
×



