

来源:网络转载更新时间:2020-05-12 17:03:18点击次数:5840次
目前,我国配合饲料与颗粒饲料设备的研究已引起重 视,除外贸、水产系统外,农机、粮食、商业、畜牧、一机部等系 统都有单位在研制,并取得一些的成绩1。移动啮合式青饲 料颗机具有加工简单、成本较低、便于储存和运输、表面光 滑、硬度高、颗粒内部熟化深透等特点,是养兔、鱼、鸡、猪、 羊、牛专业户及中小型饲料加工厂降低养殖成本,提高经济 效益的理想设备。因此,开发利用颗粒青饲料,优化原始的 机器结构和降低消耗能量,促进绿色经济的可持续发展,具 有深远意义。在我国,大多数的青饲料颗粒机技术主要是从 国外的相关产品进行改进设计而来,为了得到能量高、体积小 的生物质颗粒,人们研制了生物质青饲料颗粒机,将粉碎后的 生物材料通过挤压而得到高密度、表面光滑的青饲料颗粒。
移动啮合式青饲料颗粒机是制造颗粒的主要设备,它是 将枝农田秸秆,玉米、豆粕、草、稻壳加工过程的粉碎、筛选、 挤压等工序集为一体,采用柴油机为动力,将整个工厂变成 移动式的加工厂。该设备可大幅度降低压缩颗粒加工能耗 与成本,便于运输、贮存,进而解决了限制生物质大规模利用 的主要问题。该机器的批量生产,可以在农业与林业领域取 得良好的经济效益和社会效益。
国外使用的青饲料颗粒机有平模式及环模式两大类,而 移动啮合式青饲料颗粒机是属于环模类的,但是与以往的环 模青饲料颗粒机大不相同。该青饲料颗粒机是通过柴油机 驱动来带动主轴转动,进而带动与主轴连接的带内齿轮的环 模、压辊齿轮进行齿轮啮合运动,靠着压辊齿轮和环模内齿基金项目 国家林业局推广项目”林业生物质就地深加工木颗粒技术推广 轮之间有较高齿轮的摩擦温度。物料在进入制粒系统之前, 先通过推进螺旋对其预压,然后再被推入环模压辊齿轮间进 行制粒。物料从进料斗倾入时,减速链轮分别通过链条与带 链轮、链轮连接,通过改变大小链轮的传动比来实现进料速 度的调节。随着物料流入制粒系统,在环模和压辊的强烈挤 压作用下,物料被压实,挤入环模的模孔中,并通过物料自 身的化学元素发生黏合、凝固,在这对齿轮啮合的挤压作用 下,从环模孔中挤出,经过切刀的分段,最后从出料口流出压 缩饲料颗粒。
在原料被齿轮啮合挤压到成型孔里这一压缩过程中,不 需要添加粘结剂,由于原料软化后有一定的粘结作用,可自 行粘结。在实际工作中因为会在环模内齿轮与压辊齿轮齿 根之间残余一些粉末,可能会影响到下一个颗粒成型的挤出 速度以及给这对齿轮啮合造成摩擦力增加以致堆积过多,使 得两齿轮卡死。因些需要设计一个环模清理机构,对环模内 齿轮齿根残余的一些粘结粉末进行清理,使得这些粉末子重 新又掉在啮合挤压区域,以保证整个机器挤压出粒顺畅。
该设计研究的是环模清理机构,由柴油机动力源通过皮 带带动主轴,通过压辊齿轮与环模内齿轮啮合,带动环模转 动。通过外齿轮与托辊中的小齿轮啮合传动,再通过涡轮减 速器带动链轮,再由链条通过张紧机构将链轮、清理机构上 的带链轮推力轴连接带动。这样通过齿轮比,涡轮减速器比 将转速降到合适的低速转动。
1环模清理机构的结构设计与工作原理
如图1,2,3所示,环模清理机构固定于机架上,主要由 ①直线导轨连接板、②清理轴、③凸轮盘、④深沟球轴61910- 2LS、⑤推力轴、⑥链轮、⑦轴承座连接板、⑧TBR16S190直线 导轨副等组成。
其工作原理:将柴油机驱动来带动主轴转动,通过链轮,
注:1.直线导轨连接板;2.清理轴;3.凸轮盘;4.深沟球轴承 61910-2LS;5.推力轴;6.链轮;7.轴承座连接板;8.直线导轨 副 TBR16S490。
图1环模清理机构主视示意图

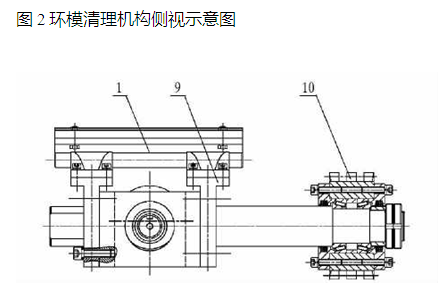
涡轮减速器等等传动装置把动力传送到应该机构的⑥链轮 上,带动⑤推力轴,使得安装在⑤推力轴上的③凸轮盘和④ 深沟球轴承随之转动;而由④深沟球轴承、③凸轮盘、②清理 轴组成等效的对心直推等宽凸轮机构。这样②清理轴带着 ⑩齿轮便会随之③凸轮盘和④深沟球轴承的转动在环模里 作往返穿插运动。
2建立样机三维模型
ADAMS是全球运用最为广泛的机械系统仿真软件,用 户可以利用ADAMS在计算机上建立和测试虚拟样机,实现 事实再现仿真,了解复杂机械系统设计的运动性能。用户可 以运用该软件非常方便地对虚拟机械系统进行静力学、运动 学和动力学分析,输出位移、速度、加速度和反作用力曲 线3。因此,利用了 ADAMS软件对环模清理机构进行仿真 分析,并验证该机构的可行性以及分析清理主轴清理环模运 动过程中的各项参数间关系。
由于ADAMS的建模功能较弱,而强化ADAMS建模功 能的较好途径就是利用Solidworks来建立参数等价模型,仿 真分析过程中对其进行虚拟样机简化,满足当代产业工程并 行的需要。鉴于只是对环模清理机构的运动进行简单的运 动分析,并没有考虑对其受力及碰撞等问题,并将一些零部 件合理地进行组合简化,这样大大降低了建模的难度。对于 ADAMS建模而言,建模越简便越好,这样有利于约束的添加 及分析计算4。
2.1建立等价的三维模型 打开Solidworks 2012,设置好零 件模板后,由于原结构中,整个部件安装在①直线导轨连接 板和⑦轴承座连接板上,因此①直线导轨连接板和⑦轴承座 连接板建模的时候分别看作如图4中的①固定板和④固定 板2所示的结构中⑥清理轴、⑦直线导轨副、⑨轴连接块、⑩ 齿轮相连的。建模的时候如图3中的②框架所示,结构中② 链轮、③推力轴、④深沟球轴承、⑤凸轮盘也是相连的;建模 的时候如图3中的③凸轮所示;根据机构尺寸简化后,画出 零件模型,然后按照设计的装配关系进行正确的装配,并将 装配体文件另存 Constant_Breadth_c - am_mechanism. x_t。打 开ADAMS/View,设置好工作环境后将此x_t文件导入ADAMS 中。
2.2添加约束及属性 如图5所示,将固定板和轴承连接 架分别与大地间创建固定副;将固定板与框架间创建移动 副;将凸轮与框架间创建凸轮副。另外,由于凸轮是绕某轴 线旋转,将凸轮与轴承连接架间创建转动副。其实际机构几 何尺寸计算得出,并旋转中心是凸轮盘中心的偏心距为5 mm的一个中心线上。另外,给出凸轮添加实际质量为2.6 kg,给出框架添加为6.53 kg。
2.3施加运动 该机构的动力来源为柴油发动机,将实际 的柴油机的额定转速通过减速器传动比和传动机构的传动 比,计算出推力轴转速为48. 6 r/min。往凸轮添加Rot Joint Motion,其中function设置为291.6 d* time。由于凸轮为偏心轮,并且偏心距为5 mm,而清理轴是作往返穿插运动,经 计算可知,清理轴的行程为10 mm,而且完成一个往返运动 需要的时间是1.356 so经过分析测量的结果,此图显示的数据与计算得到的数 据是一致的,符合要求。因此,明显可知该机构是可行的,而 且可以从数据曲线中知道清理轴随着时间变化的位移,速 度,加速度以及凸轮盘转一周花的时间也保证在1.36 s左 右。这样该清理机构能够做往返5 mm穿插,而且清理一次 时间为1.36 s,以保证这个机构的清理工作的可靠性。
4结语
该文对移动啮合式青饲料颗粒机的环模清理机构进行 结构设计与分析,将其已简化为等宽凸轮机构,并通过ADAMS 软件对其进行仿真分析,不仅仅模拟出对整个机构中的 关键零件的运动情况,而且得到了清理轴的位移,速度,加速 度随着时间变化的情况,更验证了整个机构的可行性和可靠
本文源于网络转载,如有侵权,请联系删除
 ×
×



