

来源:网络转载更新时间:2021-06-30 15:09:54点击次数:3756次
回转式水泥包装机已成为水泥包装的主流产品,具有高效、可靠、稳定性好等特点,但是普遍面临的问题在于操作过程中需要人工套袋才能完成水泥灌装,不仅劳动强度大,而且在粉尘污染环境下作业危险,容易造成生产事故,降低生产效率[1—5]。为此,以回转式水泥包装机为研究对象,开发与其配套的自动套袋装置,以实现水泥包装过程的全自动化。
1总体设计
回转式水泥包装机在操作过程中,除人工套袋外,其他如灌装、计量、掉袋等均可自动完成。在包装机四周均匀分布有多个出料喷嘴,研究的自动套袋装置主要功能是将阀口袋稳定地套至出料喷嘴上,实现与回转式水泥包装机同步对接,以代替人工进行自动套袋。自动套袋装置主要适用于尺寸为500mm×650mm的阀口袋包装,设计套袋速度为1200袋/h,套袋成功率不低于99.9%,依据人工套袋工作流程,采用模块化结构设计[6—7]。自动套袋装置可实现供袋、取袋和套袋等功能,对应的3个模块功能为:供袋机构,从供袋盘连续输送阀口袋;取袋机构,吸取阀口袋并将袋口张开至可套入水泥包装机出料喷嘴的尺寸;套袋机构,机械手爪抓取张开状态的阀口袋,将阀口袋套入运动中的出料喷嘴,与包装机对接完成灌装流程。
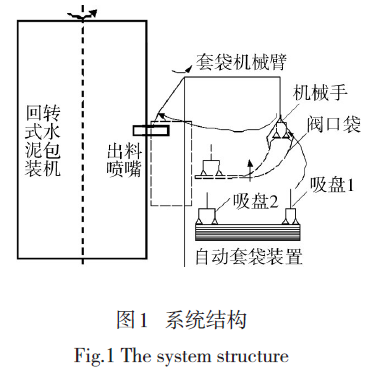
系统总体结构见图1,左边为回转式水泥包装机,右边为与其配合的自动套袋装置。在包装机四周均匀分布多个出料喷嘴,绕包装机中心轴回转,当每个出料喷嘴旋转至套袋工位时,自动套袋装置迅速将阀口袋套至出料喷嘴上。阀口袋精准、平稳地张开动作非常关键,可借鉴不同包装机张袋方式进行综合设计[8—9]。图1中自动套袋装置的吸盘1和吸盘2同时从供袋盘上吸取阀口袋,吸盘2垂直运动,吸盘1做逆时针弧线提升,由于提升高度不一致,且单边吸取,吸盘1沿弧线逆时针提升后,阀口袋袋口因两侧面受力不均匀而自动张开,达到张袋目的。袋口张开后,机械手抓取阀口袋,套袋机械臂牵引与出料喷嘴对接。机械手抓取袋口已张开的阀口袋,套袋机械臂牵引完成套袋。
2供袋机构
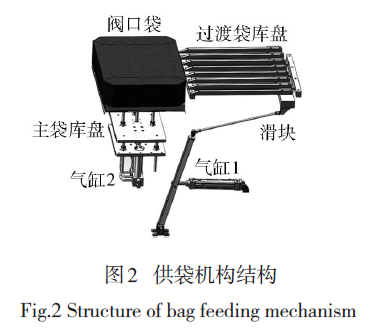
供袋机构连续不间断地提供袋源,同时具有自动检测无袋信息和阀口袋位置的功能。采用SolidWorks软件设计的供袋机构三维结构见图2,由主袋库盘和过渡袋库盘组成,交替工作。设备初始运行时,阀口袋被送至主袋库盘,主袋库盘将阀口袋运至套袋工位,开始进行自动套袋。计数器记录套袋数量,当主袋库盘上阀口袋的数量少于一定数量时,过渡袋库盘接替主袋库盘供袋,主袋库盘回到初始位置,下一批阀口袋运送至主袋库盘上,当过渡袋库盘上的阀口袋全部套完后,主袋库盘继续进行供袋,进入下一工作循环。该设计实现了袋库盘的连续供袋,提高了自动套袋装置的运行效率。
3取袋机构
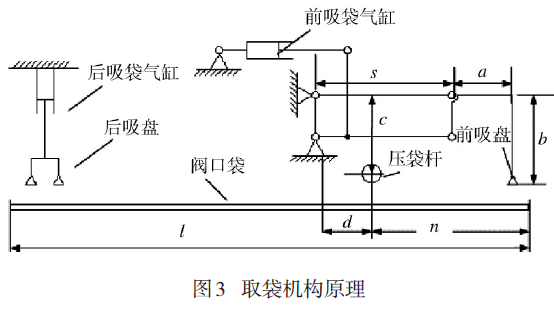
取袋机构主要功能是吸取套袋工位的阀口袋,并张开袋口等待机械手爪抓取。吸取和张开袋口动作同时进行,利用阀口袋单边受力后袋口自动变形而张开袋口,前后同时吸取。由于前后吸取高度差,加上压袋装置的作用使得袋口自然变形张开。取袋机构工作原理见图3,后吸盘与后吸袋气缸直接连接,前吸盘与前吸袋气缸之间由平行四杆机构转换运动方式,平行四杆机构还具有行程放大的功能。工作时,前后吸盘同时吸取,前后吸袋气缸缩回,带动前后吸盘的提升,前吸盘在平行四杆机构的带动下,位移量比后吸盘大,压袋杆对阀口袋的阻力导致袋口自然变形后张开。见图3,设计的平行四杆机构杆长度s=300mm,压袋杆相对平行四杆机构位置c=70mm,d=50mm,前吸盘相对高度b=100mm,伸出长度a=20mm。通过调节气缸与平行四杆机构的相对位置,可达到理想的袋口张开效果。
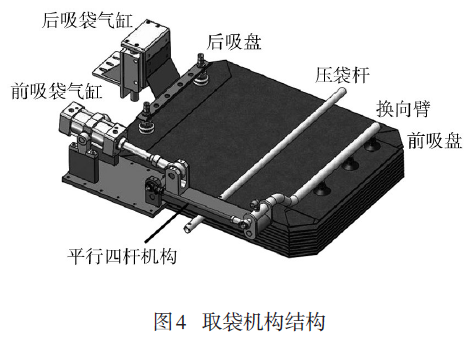
取袋机构三维结构见图4,主要由前后吸盘、前后吸袋气缸、压袋杆、换向臂和平行四杆机构等组成。前吸盘采用换向臂结构布置,3个吸盘均匀布置,换向臂为空心管结构,吸盘气路布置在换向臂内,这样既降低了吸盘气路受阀口袋粉尘的影响,又避免了气管布置因反复运动造成的气管老化和漏气问题。同时,换向臂使得前吸袋气缸可以布置在阀口袋的套袋工位以外,使得空间布局更加开阔,解决了与套袋机构机械手爪运动产生运动干涉等问题。压袋杆为圆杆,取袋时与阀口袋表面贴合度好,不至于造成袋子的损坏。
4套袋机构
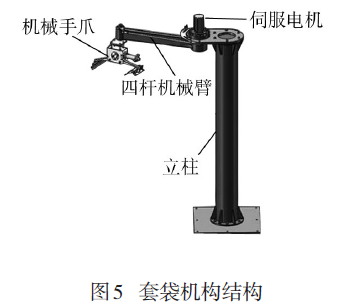
套袋机构主要实现将阀口袋平稳套至出料喷嘴上。由于出料喷嘴不是静止状态,而是随着包装机作圆周回转运动,增加了套袋机构的设计难度。这里,采用机械手爪和机械臂来设计套袋机构[10—13]。设计的套袋机构三维结构见图5,由机械手爪抓取张口的阀口袋,在机械臂的驱动下,与回转式包装机的出料喷嘴对接,完成套袋动作。套袋机构运行的轨迹与出料喷嘴轨迹啮合时两者对接稳定性较高。机械臂结构采用四杆机构构型,四杆机构末端运动轨迹变化取决于各杆杆长的比例[14—16]。对机械臂四杆机构建立数学模型,根据空间布局和套袋机构运动轨迹,优化设计出机械臂四杆机构的最佳尺寸。
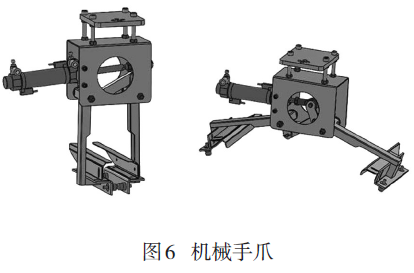
机械手爪采用气缸驱动,通过中间连接杆联接2个手爪关节,使2个手爪关节运动能够同步,见图6。机械手爪在抓取袋子时,需避开取袋机构的换向臂,同时还要求能够维持袋口张开状态,因此,将手爪设计成对称结构,还能保证阀口袋与出料喷嘴的安全对接,避免手爪与回转式包装机出料喷嘴产生干涉。在手爪末端添加了缓冲垫设计,缓冲垫可以有效地降低在夹取袋子时由于速度过快和力量过大造成袋子破损的几率。
在SolidWorks中给模型添加材料属性,测得机械手爪质量为5.2kg,四杆机械臂的质量为13.22kg,距回转中心的距离为826.6mm,四杆机械臂的转动惯量为5.85kg·m2。根据四杆机械臂的参数,选用取袋机构的伺服电机型号为YASKAWA的SGMGV-09A,额定输出功率为0.85kW,额定转矩为5.39N·m,瞬时最大转矩为13.8N·m,额定转速为1500r/min,转子转动惯量为13.9×10-4kg·m2。
5系统装配
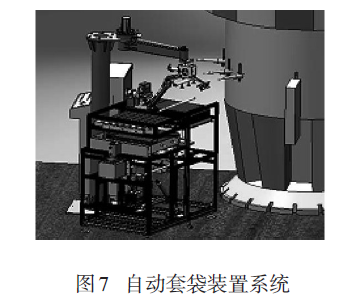
在完成供袋、取袋、套袋机构结构设计的基础上,在SolidWorks中对各个机构进行虚拟装配,系统装配模型见图7。经虚拟装配后,牵引各机构运动,并未发现有运动干涉现象,各个模块的机构设计符合要求。
6结语
针对回转式水泥包装机需要人工套袋的难题,开发与其配套的自动套袋装置,由供袋、取袋和套袋机构等3个模块组成。供袋机构连续供应阀口袋,取袋机构吸取和张开阀口袋,套袋机构将阀口袋套入运动中的出料喷嘴,与包装机对接完成水泥灌装流程。采用SolidWorks软件进行自动套袋装置的机械结构设计,在参数优化的基础上,设计了各个模块的三维机械结构,并进行虚拟系统装配,验证了机构设计符合设备要求。
本文源于网络转载,如有侵权,请联系删除
 ×
×



