

来源:网络转载更新时间:2020-09-29 11:55:09点击次数:8044次
1引言
随着现代电子技术和计算机技术的飞速宏展,电子称重仪已广泛应用于国民经济各领域中而高精度智18型电子称重仪因其具有高精度、自校正、量程自适应等功能备受用户的青睐.智能电子称重仪主要由两大系统——检测与数据处理系统和人机交互界面组成,检则与数据处理系統主要是对物品重量的测力、转换以及误差的控制及数据处理人机交互界面是指对所測结果在人们的控制下进行显示、打印等,本文主要介绍系统的检测部分,其中包括,传感器自动校正电路的设tb微电压值号可编程放大电路设计传感器标定自适应以及双cpu之间的工作。
2系统总体设计
通讯.研究的重点是系统智能化的实现方法。
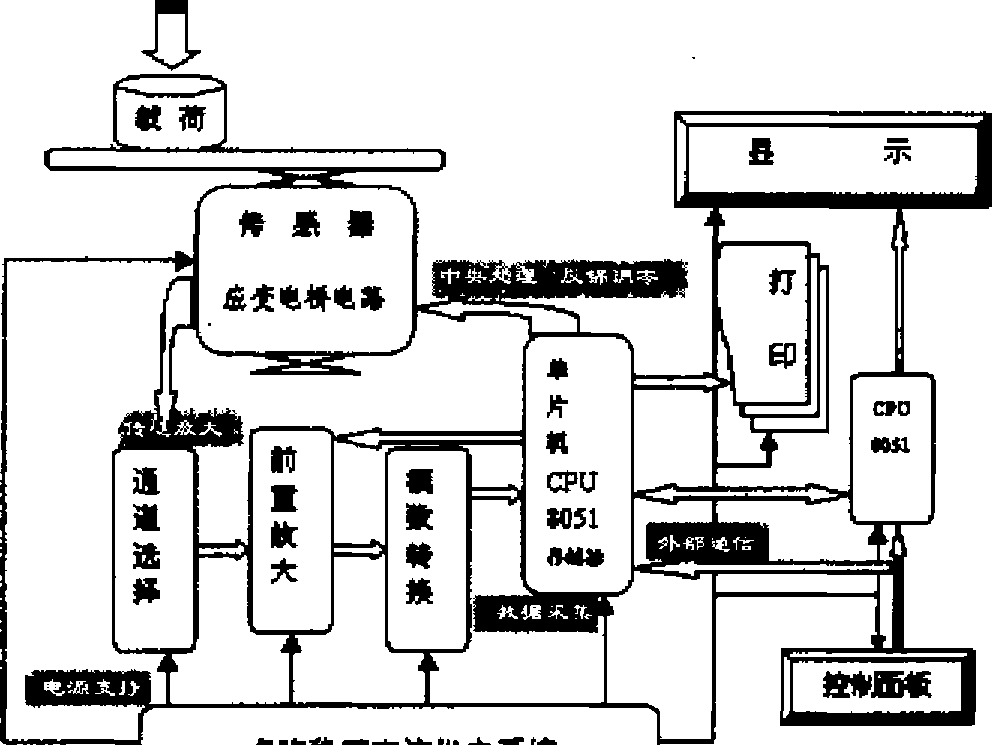
图1为电子称重仪工作原理图
称重仪检测系统主要由,传感放大电路、数据采集〈模/数转换)电路、中央处理单元、反馈焉干电路、外部通償和电源支持等部分组成。
传慝放大检测电路的功能是把重量值号通过应变片传鵬器瓣换为微变电压債号,并将其放大到适合模/数转换芯片所接收的电压信号并进行A/D转换,仪表的系统误差主要在该部分产生,因而该部分的设计关系着整个系统的精度.中央处理单无负责整个系统的运转控制,并进行数据处理、自动校正、It程自动转换、自适应传樓器更换十责终将待显示数据传送给人机交互界面系统外部通信是指检测系统的CPU与人机交互界面系统的CPU之间进行指令和数据传送的电路。电源系统为系统的稳定运行提供良好的供电系统,并提供高藉度供桥电源。
3硬件设计
电子秤检测系统硬件设计的核心包括3部分:放大电路,模/数转换电路,数控电位器
3.1放大电路
为了实现高精度和高增益,我们选用一块希密仪器用的集成放大电路芯片AD524C见图2,其输出温漂电压小于25应输入温漂电压小于共祺抑制比CMR在一般増益时约为90dB,>大非线性谡羞为0.003^(G=l时).
作为一个完善的放大器,AD524内部带有高精度的电阻器用于tt1WG=l,10,100和1000的管脚式SI程:把管JWRG2端分别和相应的放大倍敷选择管脚竭预先建接后(此时RG1蝸不鼻加连),即可实现相应倍数的放大功能.除了这种内部匹配方式外,当要求增益从1到100。连续变化时,AD524还有另外的方法实现对增益的控用一个滑动变阻器RG把AD524芯片的管牌3(RG2)和管脚16(RGD相连,与増羞G相对应的电阻值RG为
RG-40K/(G-l)
3.2數转換电路
本次设计中采用的是MAXIM公司出品的14位逐次比较S!模/数转换器MAX194.该芯片内部含有电容型DAC变换器、采样保持器、10个校准DAC、串行接口和控它不但具有高速度、高精度、低功耗等特点,而且其内部校准电路对线性度和傭置谡差进行校正,无需外部调整便能在允许温度范围内保持全部18定的牲能.串行接口的特点使其IB与大部分徽控制器直接相连,从而大大简化了系统电路设计,另外,模拟电源和数字电源分开的结构也极大地减少了数字-噪声耦合的影响,其主要性能为,分辨率14位:积分非线性误差0.33%,信号与噪声加失真比82dB;转换时间9.当参考电压为+5V时,输入电压由0〜5V或一5〜+5V变化时,输出数字量由OOOOH变到3FFFH0
3.3数转换电路
数控电位器可让CPU通过预编程序来控制其阻值的变化。本设计采用Xicor公司生产的非易失性数控电位器X9241,包含4个电阻阵列,每个阵列包含63个电阻单元,在每个单元之间和两个端点都有可被滑动单元访问的抽头点口滑动单元在阵列中的位置由用户通过二线串行总线接口控制,物理的器件地址由A0-A3输入端的状态来定义——X9241把串行数据流与地址输入端的状态比较,当所有的4个地址位都比较成功后,方做出一个应答响应表示被选中。而每个X9241又含有4个电阻阵列,因此CPU的两根I/O线一共可以控制多达64个电阻阵列,每个电阻阵列都与一个滑动端计数寄存器(WCR)和4个8位数据寄存器联系在一起,这些寄存器都可由用户写入或读出。滑动端计数寄存器(WCR)的内容控制滑动端在电阻阵列中的位JL
在X9241的指令结构中,除了读写寄存器和各寄存器间相互传送数据的指令之外,还有一条可令滑动端(WCR)iS/减一个最小单位的指令INC-WIPER,每执行一条INC-WIPER,即滑动端将在63个电阻单元中移动一个,这给调零程序的设计提供了极大的方便,
4系统工作原理
1) 初始化“系统上电之后,首先作初始化处理,如果没有来自面板-人机交互界面的操作命令,则系统在每次开机复位时首先读取EEPROM中的状态字,进行判别,自动调用初始预设置或上次关机前所设置的通道方式、基值、増益等参数。随后CPU给出指令使多路模拟开关AD7502切换为第4通道,即将精密可编程増益仪器放大器AD524输入端①脚和②脚短路,CPU通过预编的程序控制数控电位器X9241中的10K电位器阻值变化,完成可编程增益仪器放大器的自动调零工作。
2) 传感器调等』在操作者确认电子称重仪无载荷的情况下,通过人机交互界面给出传感器调零指令,CPU通过串行接口接收人机交互界面的CPU传递的信息,辨认需要调等的传應器的组号,调节相应的数控电位器X9241,分别进行初调与细调,电路完成传感器自动调零任务.
3)系统调零,在CPU完成可编程增益放大器与传感器(根据需要)调#之后,CPU通过A/D转换器MAX194将零点的剩余电压残余值采集之后存入EEPROM之中*待正常称童时再将该值减去『如果环境有较大变化,CPU未接到调零指令时,用户可随时通过入机交互界面下达调零指令,使电子称重仪表再次校准.此外,对于A/D所带来的零点测量误差,MAX194在每次上电初始20ms之内会自动校准A/D的笨点』另外,在用户给出电子称重仪表调零指令之后.CPU也将会控制A/D转换器MAX194进行调事操作『综上所述*本电子称重仪具有良好的系统自动实时调零的功能'以保证其高精度的称址工作#
4)传感器自适应功能.本系统具有独特的传感器自适应功能,该功能使系统有非當广泛
'景程可从几千克至几十吨内变化,其核心技术为可编程增益仪器放大器,当用户根据自已使用对象选择某种量程范围的传感器时,或是传感器因故障(或生产工艺变化)而更换传感器时,工程技术人员(或用户)只需将传感器与系统连接,通过人机交互界面键人指令与景程范围,并将标准公斤或吨部件(缺码)置于系统称盘上,则A/D模数转换器读入mV/kg或mV/t的值作为基值存入系统的EEPROM中,供称重时调用。同时CPU根据基值以及从人机交互系统CPU传输的量程范围参数计算并确定可编程增益仪器放大器AD524的増益,CPU控制数字电位器X9241中的2K电位器使可编程增益放大器工作在新的增益条件下,完成传撤器量程的校准与标定工作.
5软件设计
本次设计的电子称重仪除了在一般工作状态下显示被称物品的重量值之外,还具备通道设定、基值设定、单位设定、增益设定、自动调零及默认状态保持等一系列功能。
5.1主程序设计
电子称重仪检测系统中的上述功能都是用户通过人机交互系统中的控制面板来进行调用,因此,检测系统和交互系统之间约定了以下协议;人机交互系统的每一种功能调用都设有一个字节与之相对应,称为命令字。控制面板进行某一功能操作时,相应的命令字被从人机交互系统发送,检测系统以串行口中断的方式接收(因检测策统要重JE执行称量和发送称量结果的操作,故只能用中断方式接收而不能用査询方式)之后,进行命令判别'转入相应的服务子程序。同时也将该命令字写入EEPROM,变为复位后要读取的状态宇保存.如果用户在系统称量过程中进行了面板操作(参数貫置),检测系统在中断程序中刷新EEPROM,返回后自主程序的开头重新读取EEPROM状态字执行程序。
在每次系统开机和参数重置之后『都安排一次放大器的自动调零程序设计中在每次申行口中断调用过后需要主程序跳出循环称量而从头执行,但由于中断程序的待点是返回潟用原处,因此附加设置了一个标志位7QH,用来判断是否发生过中断调用,若发生则跳出称量循环十重置参数”
5.2子程序设计 -
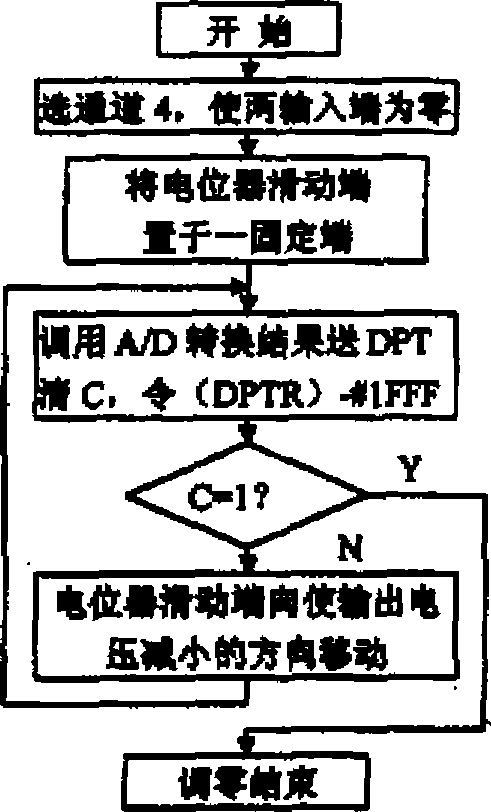
5.XI放大器调半子程序
首先,CPU选择多路模开夹的第4通路,结果是放大器芯片的两个输入端短地十输入电压信号为零,放大器的输出值为待被调整的对象——直流偏压.把X9241的滑动头打在使放大器输出正偏置电压的那个固定端,也就是往相应的WCRC滑动端计数寄存器)内送OOH^后调用A/D转换程序,把得出的数据(大于1FFFH)与1FFFH作减法运算(1FFFH是ADCMAX194的电压模拟输人量为零时的输出数字量,判别差是否为正数,若为正数则重复WCR加KA/D和减法操作,直到当相减的结果为零或由正变负时停止。
5-2.2传感Sm程序
传感器调零的程序设计与放大器的调零思想类似#不同之处在于;CPU先不用给WCR
置数,而是直接调用一次A/D转换,判断数字量的输出与1FFFH的大小,如果大于则进入WCR逐步加1子程序渚小于则进入WCR逐步减1子程序。在这两子程序的一个中逐步改变WCR值直到A/D输出童与1FFFH最近时停止.
5.2.3基值设定程序
首先把标准重lkg的硃码放置于托盘中,然后在人机交互系统的控制面板上选择基值设定健按下,此时检测系统的CPU将会因接收到申行通信的信号而转入中断处理子程序,在中断处理子程序中判别接收到的该操作命令字,从而进入基值设定子程序。
文章来源于网络转载,侵删
 ×
×



