

来源:网络转载 更新时间:2020-08-25 08:55:34点击次数:3460次
伴随着科技的发展,如今的加工厂愈来愈多的引进机电一体化机器设备,这种自动化机械,不但提升了工作效能,并且非常大程度的节约了人力资源管理。堆垛是加工过程中一个关键的阶段,对很多商品开展堆垛,人力资源早已不可以担任,因而自动化技术堆垛机器设备就看起来尤其重
要。文中对于规格型号为350mm伊210Mm伊230Mm、负荷在10kg的纸箱子开展堆垛运送而设计方案了一台堆垛机,用以在生产流水线最后一步将包装箱全自动堆起来垛。
一般的堆垛机具备二维挪动、三维挪动本身或是多可玩性的串连智能机器人来进行码垛,并且大多数手臂组织 选用的机械设备夹手,较为繁杂。文中明确提出的堆垛机除了具有传统式三维堆垛机的本身构造,另外选用气动式玻璃吸盘的爬取结构形式,提升了旋转汽缸的关节,能够完成纸箱子相位差九十度的放置,使传统式的堆垛机更加灵活,且构造简易、紧凑型,考虑加工工艺规定。原文中最先得出了详细介绍了码垛的机械设备体系结构示意图,随后详细介绍了自动控制系统的设计方案及手机软件的设计方案,最后完成了预估作用。此次设计方案的码垛具备构造简易、方便使用等特性,提升了工作效能,节约人力资源管理。
1包装箱堆垛机构造介绍
加工工艺规定:皮带传输包裝好的包装箱,由感应器检验及时后,由码垛开展堆垛,控制板操纵三维空间的挪动、手臂旋转、与玻璃吸盘的抓球,完成码垛。根
据规定设计方案的码垛整体构造如图所示1所显示。关键由下列几一部分构成:
1)架构,因为铝合金型材具备品质轻、抗压强度高、抗腐蚀、维护费用低等多种多样优势,因此堆垛机行为主体架构选用铝合金型材组成,铝型材中间用T型螺钉连接。
2)动力装置。因为机器设备爬取的包装箱具备部位规定,因此XYZ三轴选用伺服电机来出示驱动力。
3)齿轮传动。齿轮传动Y、Z两轴因为间距较长,因此选用齿条传动系统,以完成精准定位。X轴选用链条传动具备稳定的特性,另外相互配合感应器限位开关。
4)手臂构造。选用了摆动气缸+真空吸盘的结构。
纸箱子的运输选用输送带传输,根据感应器感应做到对纸箱子精准定位的目地。
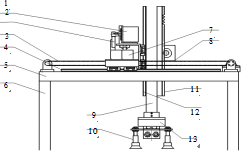
1.Y轴电动机2.Y轴齿轮齿条3.同步皮带4.Y轴滑轨5679.铝型材8.Z轴电动机10.玻璃吸盘11.Z轴齿轮齿条12.Z轴滑轨13.旋转汽缸
图1包装箱堆垛机框架图
2自动控制系统设计方案
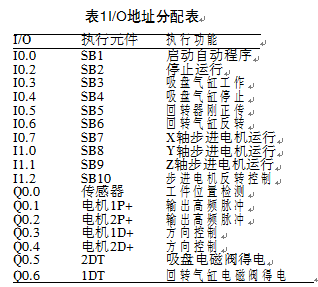
依据系统功能,关键操纵目标有3个伺服电机、玻璃吸盘、旋转标准气压缸。依据操纵规定,I/O分配表如表1
自动控制系统选用PLC做为控制板,根据感应器行程开关来给PLC数据信号,PLC历经逻辑性解决根据伺服电机控制器驱动器伺服电机作出相对的姿势,获通
过继电器操纵旋转气缸或玻璃吸盘姿势。操纵整体方案如图2所显示。
图2操纵整体方案
3软件流程图设计方案
依据加工工艺规定,编制了流程图,如图所示3所显示。最先程序流程复位,输送带起动,刚开始码垛。这时
X、Y协调健身运动到待爬取包装箱上边终止,等候爬取。感应器检验包裝好的包装箱及时后,Z轴降低,真空吸盘汲取,旋转气缸依据置放的部位来分辨是不是转动,X、Y、Z轴一起健身运动,来开展堆垛。根据堆垛机上的感应器检验是不是放满,假如这一垛已放满,由传输线送出去,那样能够确保在每一次刚开始码垛以前,上一次的垛早已送出。
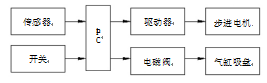
图3流程图
4结语
该机器设备能不错的完成预估作用,具备可靠性好、构造简易的特性;选用了伺服电机相互配合同步皮带与齿条、摆动气缸、玻璃吸盘的爬取构造,使组织 更紧凑型,更为灵便,考虑加工工艺规定。
文章来源于网络转载,侵删
 ×
×



