

来源:网络转载更新时间:2020-08-14 09:26:05点击次数:4332次
0引言
随着烟草行业对卷烟包装机械生产速度的高速要求,烟草包装机械已经迈入从中速(300包/min-400包/min)迈入高速(500包/min-600包/min)时代。中速的执行机构已经无法满足高速下运动性能的要求,取而代之的是釆用更优化的运动机构。
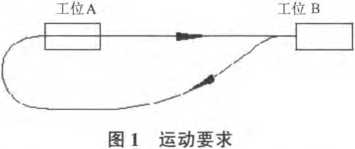
在烟包外透明纸包装机中,包装工艺要求推烟包器将输送带上的烟包从工位A推入透明纸包装轮的模盒内,即工位B;同时要求推烟包器在从A工位到B工位的前进过程中保持水平直线运动。在回程时,由于需要避让后方输入的烟包,推烟器在直线回退运动的同时需要有上下摆动的运动,运动轨迹如图1所示。在YB55A型中速包装机中,推烟包机构采用曲柄滑块机构和凸轮连杆机构并联的复合机构来实现该运动要求,如图2所示。虽然它可以实现图1中的运动要求,但由于安装推烟包器的滑架与支架存在着移动副,所以两者必然具有滑动摩擦,如在高速包装机中仍釆用原机构,在运转速度大幅提升情况下,运动摩擦必将大大提升,这样会造成机构元件的寿命下降,机器嘈声提高,严重影响运动性能,显然已经无法满足高速运动要求。因此,为了满足高速运动要求,在YB517型高速包装机中,推烟包机构釆用曲柄摇杆机构和凸轮连杆机构并联的复合机构,避免了滑动摩擦;同时通过对摆动凸轮机构的轨迹曲线设计,实现运动姿态要求。根据理论设计结果,进行案例设计,并进行运动仿真,检验该机构运动可靠性。
1机构运动要求
整个机构运动要求执行端在从工位A到工位B的过程中保持直线运动,回程为了避让下个烟包,需按图1所示轨迹退回。
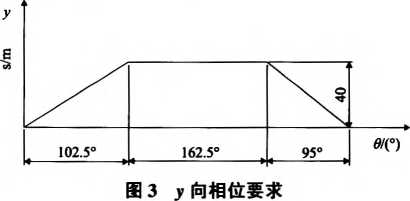
为了满足运动要求和与其他机构的配合,推烟端在,方向的相位为102.5。段为上升段,162.5°段为静止(推包)段,95。段为下降(避让)段,相位图如图3所示。运动规律方程的选用,会影响凸轮的轮廓形状和整个机构运动的动力学性能。由于要求该机构在高速下运行,『方向在上升段和下降段运动规律采用了4-5-6-7多项式运动规律,多项式运动规律是高速凸轮机构中广泛使用的运动规律之一。它的通用性强,可按照任给定的若干运动特性要
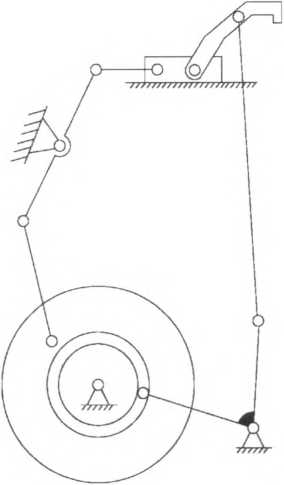
图2传统推烟包机构
求设计运动规律,运动特性的约束越多,多项式的项数或蓦次数就越高。只要蓦次数取得足够高,对应的高阶导数总是光滑的和端点连续的。
2机构运动分析
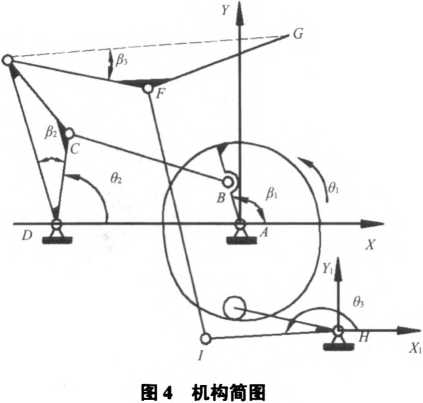
设执行端G坐标为(C,,C,),其中C,在上升段和下降段釆用4-5-6-7多项式运动规律,令G,=S(S),0,为凸轮转角。凸轮机构驱动杆F/,四杆机构ABCDE驱动杆CDE,如图4所示。
根据文献[1-2]解析法计算。首先分析四杆机构ABCDE,给定杆长为IabJbcJCdJdc和如以及曲柄AB与凸轮安装定位角,和杆CDE内夹角国,则有下式:a 丄(如sin(S+q))
\21bd+棚) +如cos(+01))
=丿如+如+2如LoCOs]S+F]) (2)
E点的坐标为:
E.=Ibecos(P2+02)-Iw (3)
Er=lDEsin(P2+e2) (4)
其次分析杆EFG,给定杆长农和&以及它们夹角用,则有下式:
C点的坐标为:
G,=J皓;-(G,-E,V+E, (5)
C,=S(S) (6)
F点的坐标为:
F,=E,+IefCOS(甲2) (7)
Fr=Er+lEFsin(
其中:
W2=arctan(%|i)-,3 (9)
下面分析杆组F0,给定杆长上和加以及H点坐标(E,,E,),则得到凸轮的输出规律:
CF-H^ 仆%+珞Y八 、
其中:
lFH=J(F,-■—+("/,)2 (11)
根据以上设计分析,推导出凸轮的输出规律再根据该参数进行凸轮的设计⑴。
3机构仿真
根据表1的参数表进行设计,并借助于Pro/E软件的建模和仿真技术*句,对推烟包机构进行运动学仿真分析。首先通过Pro/E软件的“零件”模块,建立零件模型;再在“组件”模块下根据要求组装每个零件模型,并考虑零件之间的连接关系以满足仿真要求;最后在“机构”模块中,调整零件间连接设置,设置电动机以及初始条件等,最终实现仿真运动。
表1设计参数表(长度单位mm;角度单位。)
如,BC^CD ^DE 如 81 Pl “c橢&3 l”1如
42162.6287.5 164 180 106.5 25 140276.2815.44 246130
对推烟包机构以550包/min的速度进行运动仿真,仿真运动轨迹结果见图50仿真显示执行端G的运动轨迹符合预先设计的运动轨迹要求,即符合推烟包过程的直线运动和回程的避让运动。
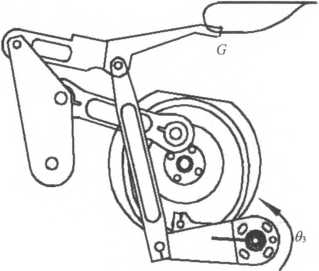
图5仿真实例
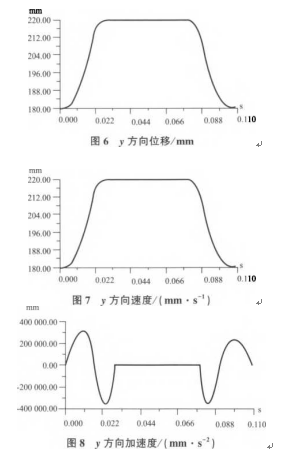
在仿真过程中,选取执行端C点作为测量对象,测量出〉方向的运动特征。执行端G点运动符合相位设计要求,并良好吻合预先设计运动规律,速度和加速度保持连续性,如图6、图7和图8所示。
4结语
从理论上和仿真技术对YB517推烟包机构进行了运动学分析,建立了推烟包机构主动件和从动件的运动函数,分析了推烟包机构的运动轨迹和运动学特征。结果显示,YB517推烟包机构能够实现设计姿态要求,并满足高速运动要求。
文章来源于网络转载,侵删
 ×
×



