

来源:更新时间:2023-03-28 09:33:21点击次数:3091次
1.2称重机构设计
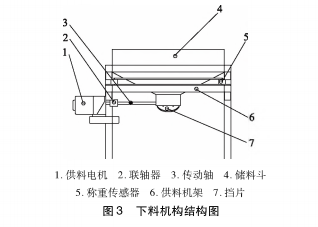
如图3所示,包装机称重机构的结构主要包括给料电机、联轴器、传动轴、储料斗、称重机架、称重传感器和挡板。在储料斗和称重框架之间固定称重传感器,实时监测储料斗中的颗粒重量。PLC控制电机在重量达到设定值时旋转,电机通过联轴器将电源传递到传动轴上,打开齿轮板。聚氯乙烯颗粒在重力作用下落入给料机构,实现聚氯乙烯颗粒的自动称重。
1.3给袋机构设计
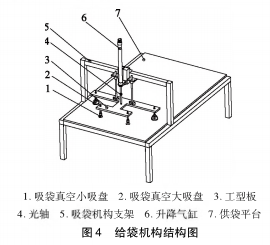
如图4所示,给袋机构用于实现塑料编织袋的自动给袋。袋式机构主要由工板、四个真空吸盘、升降缸和袋式平台组成。由于聚氯乙烯颗粒包装在双层塑料编织袋中,外袋表面粗糙,间隙大。工型板上安装了四个吸盘,以达到更好的吸袋效果。吸收内袋的两个吸袋真空吸盘,吸收内袋和外袋的两个吸袋真空吸盘,形成吸盘组件。通过实验验证,取得了良好的效果。升降缸的活塞杆与工板连接,当气缸伸出时,吸盘部件会下降,完成吸塑编织袋的动作;当气缸缩回时,吸盘部件会上升,每次都会吸一个包装袋。
1.4竖袋机构设计
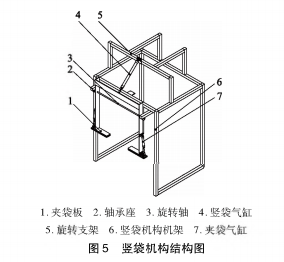
如图5所示,垂直袋机构由袋板、袋缸、旋转轴、垂直袋缸和旋转支架组成,可实现袋功能和旋转功能。首先,将包装气缸伸出,将包装袋的两侧边缘夹在包装板上,实现包装功能;然后,旋转气缸伸出,整个包装装置以旋转轴为轴旋转90,使包装袋垂直;其次,将介绍垂直袋式机构气动系统的控制原理。
1.5开袋机构设计
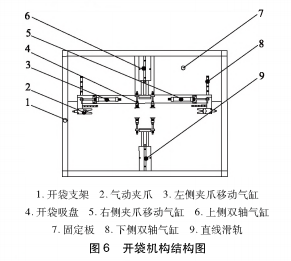
如图6所示,开袋机构可实现双层塑料编织袋自动开袋。开袋机构主要由两个气动夹爪、直滑轨、开袋吸盘、双轴气缸、夹爪移动气缸等组成。第一,夹爪移动气缸,使两个气动夹爪之间的距离大于包装袋的宽度。上双轴气缸驱动气动夹爪伸出,夹爪移动气缸缩回;与此同时,气动夹爪关闭,夹紧塑料编织袋两侧;然后,下双轴气缸伸出,打开吸盘吸气,吸收塑料编织袋内袋,上下双轴气缸同时缩回,驱动内袋拉伸到两侧,达到开袋效果。
 ×
×



