

来源:网络转载更新时间:2021-06-25 16:39:16点击次数:1347次
0引言
智能称重系统在工业生产和日常生活中应用广泛,市场上的这些台称与平台称等小型称重计量仪表,主要是对静止的东西(如货物)称重,而对动态称重(如动物,家禽)存在功能单一或者没有相应的功能的问题[1]。在称重技术中,应用最普遍的是由应变片和弹性体组成的测力传感器。将重物放于称重系统的托架上,待稳定后,就可以准确地读出重量值,但当需要进行快速称重时,这种传感器就暴露出缺陷。由于其弹性体的阻尼比过小,传感器到达稳态的时间较长,不能满足快速测量的要求[2]。称重信号中包含低频随机干扰,且采样得到的信号太短,对动态称重信号作简单的数字滤波,系统的精度难以得到很大的提高。依据衡器国家行业标准,基于嵌入式计算机研制了新型的多功能智能称重仪,称重仪既具有基本称重功能包括按键皮重功能、皮重内锁功能、自动去皮功能、自动零跟踪功能、动态检测功能、手动和自动累计功能,又有动物称重、计数、峰值保持和累加等特殊称重功能。
1嵌入式称重仪硬件构成
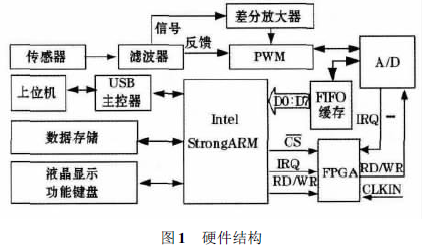
系统由嵌入式计算机、数据采集与存储、信号处理、PWM脉宽调制、人机接口和USB接口通信等电路部分组成,如图1所示。硬件电路由ARM作为系统的控制中心,完成多路信息的实时采集,对实时采集的数据进行数字滤波校正、分时存储,完成对数字信号运算、显示、传输等功能,可以通过对扩展电路的控制,对键盘进行扫描,而后通过键盘散转程序,对整个系统进行控制。信号采集部分利用称重传感器检测压力信号,得到微弱的电压信号,而后经处理电路(滤波、差动放大)以及PWM脉宽调制处理后,送A/D转换器转化为数字量输出。通过USB接口与上位机通讯,可根据主机PC发送的控制参数,对被测对象的压力参数进行控制调节,进一步完成人机交互界面的管理、图形功能、参数设定及自诊断。
嵌入式硬件是嵌入式32位处理器StrongARM*SA-1110,软件平台采用WindowsCE。PlatformBuilder是为嵌入系统设备开发和定制基于WindowsCE的操作系统的工具。在创建基本平台的过程中主要包括配置平台、创建操作系统映像、传输映像到目标设备和调试系统,而在定制平台的过程中主要有开发用户自己的OAL(OEMAdoptionLayer)、设备驱动程序、引导装载程序、组件、本地化等[3]。
2主要电路设计
2.1数据采集电路
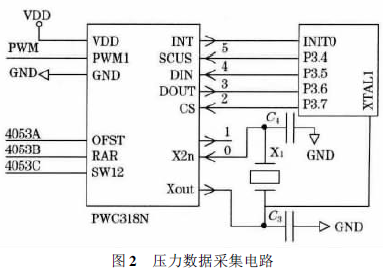
采用高精度A/D转换器PWC318N,用模拟开关、积分器、比较器等构成Σ-Δ型调制器,转换速率可达200次/s,与控制器结合PWC318实现对调制器脉冲信号进行数字抽取滤波,非常适用于高精度电子天平和电子秤等场合。通过连接外部晶体振荡器,PWC318的内部时钟发生器产生时钟频率信号TCLK,脉宽控制器接受比较器的输出Σ-Δ码,同步到PWC318的内部时钟信号,产生脉宽输出信号。脉宽输出信号控制模拟开关,当为“0”时,接通-VREF,当为“1”时,接通+VREF。PWC318通过内部16位计数器来计数脉宽输出信号为高电平时的脉冲数,将结果进行迭加后,通过向控制器发中断请求,控制器读计数值,实现对2N个采样值迭加后取平均值的数字滤波,数据采集电路如图2所示。
2.2人机接口电路
称重仪需要实现输出各种结果显示,采用AG320240大屏点阵图形液晶显示模块。控制器中使用了512K字节的存储器,存储了系统需要的16×16点阵汉字字库、界面显示背景图等。由于液晶显示器内置了SED1335控制器,对液晶显示器的控制变为对SED1335控制器进行接口通信,简化了对液晶显示的控制。称重系统中设有多个功能键,键盘采用矩阵形式排列,按键设置在行列式交点上,通过键盘向装置系统输入相关参数和控制命令。
2.3信号处理与PWM电路
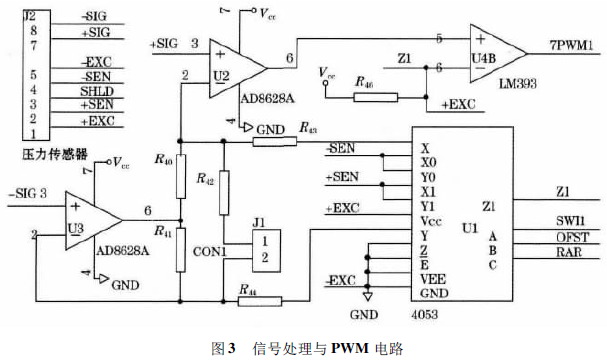
传感器是称重系统中实际承压值测量的关键元件,称重传感器采用了应变片压力传感器,输出的信号通过滤波电路后送给差动放大器。采用PWM脉宽调制电路,实现对小信号的自动控制补偿,提高了电路的线性和稳定性。信号处理与PWM电路如图3所示。
3称重仪的动态补偿
荷重系统经过简化可以看成单自由度二阶系统,测重环节中的应变式测重传感器加秤体构成测重部分,可以等效为由弹簧、阻尼器组成[4],系统等效模型如图4所示。
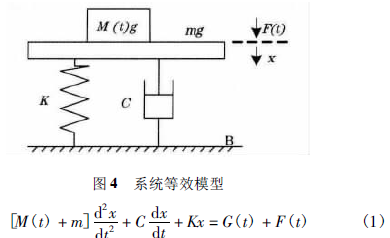
式中:m为秤体质量,由传感器本身的等效质量和托盘质量组成;M(t)为被测质量;C为阻尼比例系数;K为刚度系数;x为在垂直方向偏离平衡点的位移;F(t)为垂直方向作用力。
采用分段线性化法将模型近似为线性时不变系统,建立系统的数学模型。因为应变与应力呈正比,而电桥输出电压U与应变呈正比关系。设在一个时间段[t0,t0+Δt]内,式(1)可以简化为一个线性时不变系统,把F看作是Mg的一部分,即G=Mg+F。设各种初始条件为零,K0为灵敏系数,对式(1)做拉普拉斯变换得:
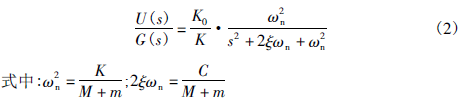
当秤体空载时,敲击秤台产生冲击激励信号,获得系统的冲击响应,从而得到系统模型[4],其阶跃响应如文献[5]。荷重系统的动态响应品质较差,由于阻尼非常小,振荡严重,采集的信号不能反映真实的测量值,同时阻尼过小,动态响应过程到达稳态的调节时间长,测重系统的快速性得不到保证。采用动态数字补偿处理改变系统阻尼系数,在系统中增加串联补偿环节必须尽可能提高系统输出动态品质,即尽可能增加ωn,ξ达到最佳值0.707左右。系统输出由X(s)转化为Y(s),即Y(s)=X(s)H(s),且使Y(s)的ξ达到0.707,ωn不变。设数字补偿环节H(s)的零点为X(s)的极点,数字补偿环节H(s)的极点为Y(s)的极点,并将s域变换到z域,作双线性变换有[6]:

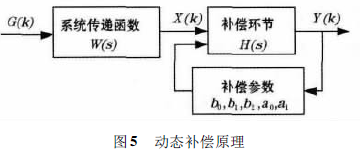
假设系统传递函数W(s),系统的模型随质量M(t)改变而不断改变它的极点,补偿环节H(s)要保证系统始终是最佳二阶系统,也应跟随系统动态模型不断调整自己的零点,与系统的极点相抵消,达到动态补偿的目的,H(s)的系数随质量M(t)是不断变化的,补偿原理如图5所示。
敲击实验获得实验过渡过程曲线,由文献[2]中的公式计算ξ,ωn值,其阶跃响应如图6(a)所示,传感器在最终输出稳定值之前,稳定输出需要0.55s.
对自适应补偿进行仿真验证,考虑模型存在误差情况下的自适应补偿效果。因此,将系统的固有频率ωn减小,此时,自适应补偿环节的零点与模型极点不能完全抵消。得到自适应补偿前后的系统阶跃响应特性,如图6(b)所示。系统的动态响应特性得到显著改善,系统阶跃响应达到97%稳态输出的稳定时间为0.6s,小于没有补偿0.55s,在存在系统误差的情况下,能很好地提高动态测重的速度。

4试验与分析
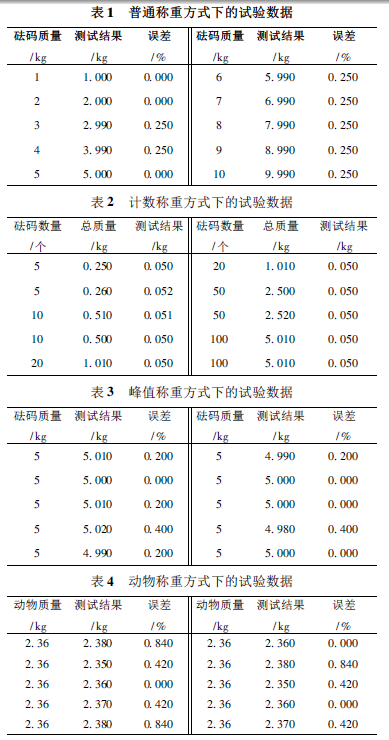
针对称重仪进行了普通称重方式、计数称重方式、峰值称重方式和动物称重方式的试验。普通称重方式、计数称重方式、峰值称重方式用砝码作为称重对象,每种方式下测试10次,经传感器校准,数字滤波和非线性补偿后,每隔10min读一次称重显示,普通称重测量误差小于0.25%,峰值称重和计数称重测量误差都小于0.4%,动物称重误差小于0.84%,称重精度达到设计的要求,稳定可靠,测试结果如表1、表2、表3和表4所示。
5结束语
基于嵌入式计算机,并用USB接口,根据需求搭建了硬件平台,对传感器进行补偿,使得传感器的振荡得以有效抑制,提高了系统响应的快速性,经过数字滤波等软件处理,实现普通称重方式和特殊称重方式。多功能便携式智能称重系统具有良好的可靠性、准确性和抗干扰能力,处理速度和测量精度提高,满足了称重的实时性要求,取得了良好的效果。
本文源于网络转载,如有侵权,请联系删除
 ×
×



