

来源:更新时间:2020-08-11 13:40:03点击次数:2017次
1引言
随着药品单元生产的批量化和质量要求的提髙,简单抽样检测已不能满足药品质量的要求,关于药品重量、成分的检测办法需要不断地提高,如何设计符合现代药品生产质量和效率要求的称重检测系统就成了一个亟待解决的问题。目前药品的成品单元主要分为片剂、丸剂和胶囊等几种,而其中胶囊的应用最为广泛。但是,目前的国内药品生产系统中,对成品胶囊的精确称重处于空白,开展关于微量称重系统的研发,对于某些贵重药品的充填和达到国际药典的要求,具有重要的经济意义和社会意义。
传统的胶囊药物生产由胶囊填充机填充药粉,采用机械式量杆控制填充药粉体积,由于药粉成分不同,导致胶囊剂量与标准剂量之间存在差异,进而影响药物的实际疗效。现有的药品称重检测设备存在的主要问题是提供了独立功能模块,但不能实现整体的药品称重检测过程,机械结构对不利于药品单元的总质量情况为标准,因此不能精确测量药品单元的最小单位,造成不合格率的升高I。文献[5]提出了胶囊成分与剂量控制关系的解决办法,但关键功能单元的机械机构未能设计实现。
针对以上问题,本文提出一种微量药品单元称重系统。该系统是一种能适应生产流水线的快速微量动态称重检测技术。微量药品称重系统实现了药品单元的传送、分拨,将药品单元依次进行快速称重,对其进行统计并及时地反馈充填效果,按需求对药品充填机做出调整,完成了药品检测的整体功能。同时,该系统利用单点式称重传感器对单个药品单元进行测量,克服了批量药品测量过程中出现的药品剂量不均问题,从而为微量药品检测工作提供了一种切实可行的方法。
2微量药品动态称重系统设计
药品称重系统设计的要求是实现药品单元传送功能、称重功能及分拨功能为整体的机电系统,该系统可以连续快速地对药品单元进行微量称重。该系统设计的主要问题有:1)该系统中称重功能的实现需要适合药品单元传送的称重平台和高精度称重传感器组成的称重机构,同时考虑到药品单元的动态称重过程,需要设计一套完整的测控平台及软件算法,从而克服称重传感器所需静态称重的特性;2)该系统中传送功能和分拨功能的实现需要提供该系统的传动机构设计,此传动机构需保证药品单元在传送过程中连续地向称重机构传输药品单元,并使药品单元的传送频率维持在药品称重系统的检测范围内,为药品单元的称重过程提供基础。因此,传动机构的传动方式确定釆用水平上料的方式,克服垂直上料方式中药品单元对称重机构的冲击引起的测量值波动;3)药品称重系统的设计作为独立的药品单元检测装置,包括传送机构的机械结构设计及测控平台设计,系统设计的工程量较大,因此采用SolidWorks软件对该系统的传送机构、称重平台等零部件进行仿真建模。同时,利用设计零部件组装药品称重系统的虚拟样机来实现运动仿真过程,为验证系统设计的准确性提供保证。微量药品称重系统的设计流程如图1所示。

图1微量药品动态称重系统的设计流程图
Fig.1Designflowofthemicroscalecapsuledynamicweighingsystem
2.1称重机构设计
2.1.1传感器的选型
药品称重系统是由3部分构成的,称重仪表、称重传感器和称重平台。其中,称重平台是被称物体与显示仪表间的机械传递系统。传力机构与称重平台将物体的重量准确传递给称重传感器。再由称重传感器将被测物体的重量按待定的函数关系转换为电信号,再输出到称重仪表。选择称重传感器时要考虑到其灵敏度、最大分度数和最小检定分度值等。
文献[6-8]说明了传感器数量的选择一般与秤体的支撑点数相一致,但也有根据最大量程等方式来确定的,当然还要考虑称重平台的自身重量,产生的最大偏载及动载等相关因素。在实际的使用中,秤体受到以下因素影响,如自重、皮重、偏载、振动冲击等。经验证,得到以下公式:
C=K0KtK2K3(W^+W)/N (1)
式中:C为单个传感器的额定量程;密为称重平台自重;W幡为待测物体净重的最大值;N为秤体所采用的支撑点数,即传感器的个数;&为保险系数,一般取1.2~1.3;K为冲击系数;&为秤体的重心偏移系数%为风压系数。
在实际应用中,作为一般规则,可简化为:
中或+呼WC/Vx70% (2)
式中:70%的量化系数即是综合考虑振动、冲击、偏载等因素运算得到。同时,药品称重系统属于微量称重,所需额定量程较小且需有较高的灵敏度及测量精度3”】。考虑到体积影响因素和要求“貫,拟选德国HBM公司的SP4C3-MR系列单点式称重传感器。
2.1.2药粒称重运动过程及控制参数的设置
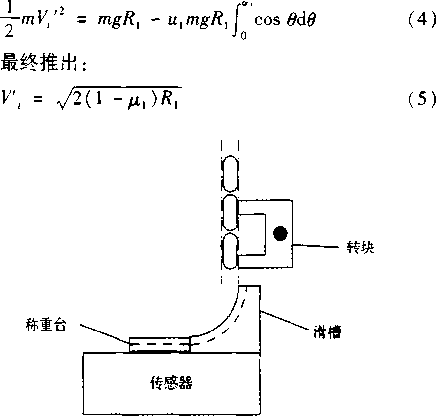
药粒通过导药管进入到称重系统中,控制系统中靠电机控制的转块装于导药管的末端。
假设单一药品单元进入称重系统,无系统外力及非保守力做药品单元做功,经导药管及转块控制落入到滑槽中,如图2所示。得到药品单元的受力过程:
■ywV/2=Ep+Et=mgRl-utmgRtcos(3)式中顷为单个药品单元的质量;S为滑槽上的摩擦系数;匕为药品单元在角度。时的末速度;E,为药品单元的机械能;E.为摩擦力做功;&为滑槽的半径;0为药品单元位置与水平线所成角度。
 称重器上的动态称重过程的动力学模型:
称重器上的动态称重过程的动力学模型:
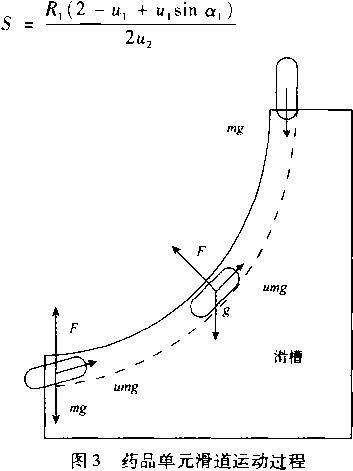
药品单元经过滑槽后,落入称重台,假设滑槽末端与称重台连接部分相切,如图3所示。得到药品单元在称重台上的受力过程:
0-Ej=u2FS=-u2mg(1+sin20)R2d0 (6)
式中:矿为由药品单元落入称重台前的动能;炎为称重台上称重系数;F为称重台对药品单元的系统内力;S为药品单元在称重台的位移;m为单个药品单元的质量;。为药品单元运动加速度与重力的夹角;&为假定称重台圆周半径。
由给定。的范围,可以得出:
<-02
mgRt(2-%+U]Sin%)=j2u2mg(1+sin20)/?2d0
(7)式中:%为药粒在滑槽模块速度的切线方向与水平线所成角度;8为称重台的倾斜角度。最终得出:
 称重信号模型
称重信号模型
由式(8)中知,药品单元在称重台上的位移为:
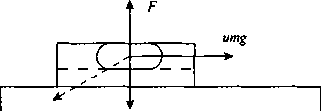
 如图4所示,药品单元在称重台上的位移需满足SWL(其中心为传感器称重部分的规格长度)。
如图4所示,药品单元在称重台上的位移需满足SWL(其中心为传感器称重部分的规格长度)。
传感器
图4药品单元称重平台运动过程
Fig.4Themovingprocessofthecapsuleweighingplatform
由式(7)知,称重台对药粒的作用力为:
F=mg(1+sin20) (10)
由于药品单元在滑槽上下滑时间在0.5s左右,同时滑槽的弧度近似于90。,假设药品单元在滑槽上下滑过程中,角度0在较短时间内的变化近似匀速变化。可知:
0(t)=5.5t (11)
因此,由式(10)和式(11)中作用力F与时间[的关系,传感器提供的电压信号应正比于作用力尸信号,为了得到电压信号V与作用力的关系式,利用定量虫码作为待测物体,采集了相应的传感器输出信号,并利用MATLAB对电压V与作用力F的函数关系进行拟合,如图5所示结果。
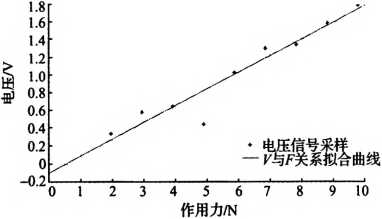
图5电压信号V与作用力F函数关系拟合
Fig.5FittingresultoffunctionalrelationsbetweenvoltagesignalVandforceF
由拟合结果可知,传感器电压信号y与作用力f的函数关系为:
V=187.5F-0.0978 (12)
因此,由式(10).(11)和(12)推出电压信号V和时间t的关系式:利用MATLAB对传感器电压信号V随时间t变化的关系式进行仿真,如图6所示。
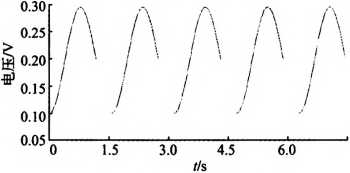
图6连续快速称重过程中传感器电压信号与时间关系(理论)
Fig.6FunctionalrelationbetweenvoltagesignalVandtimetduringcontinuouscapsuleweighingprocess
根据SP4C3-MR称重传感器的技术参数,可知其对接收电压信号的误差公式:
A=如”+dh,+九 (13)
式中:A为传感器接收信号的最大误差;%”为传感器的线性检测误差;4,为传感器的滞后误差;孔.为传感器的温度灵敏度系数的值。
称重传感器型号为SP4C3-MR,量程为3kg,根据相关技术手册可知:
冉=±0.015V
dhy=±0.015V (14)
Tlc=±0.017V
2.2传动机构设计
药品称重系统中传动机构的功能是实现药品单元的传送、称重和分拨过程。保证药品单元以设定时序连续传送,同时避免产生的振动冲击,保证药品称重过程的准确性,从而提高药品称重系统的检测精度。根据药品称重系统的功能特点,传动装置设计如图7所示。
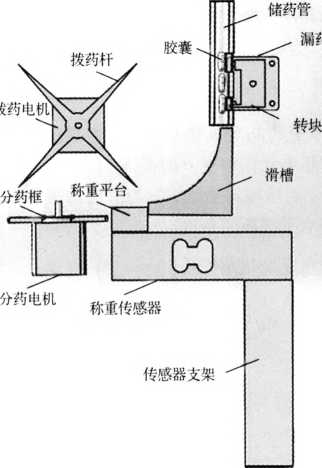
图7称重系统传动装置
Fig.7Transmissiondeviceofthecapsuleweighingsystem
2.2.1药品称重系统传送单元
药品称重系统的传送单元主要由漏药机构、拨药机构和分药机构组成。药品称重系统的传送过程是成品药品单元进入储药管后,由安装于储药管边缘的转块装置控制,使药粒按时序漏入滑槽装置,滑槽末端连接称重平台,药品单元在称重平台进行称重。药品单元完成称重过程后,由拨药机构中的拨药杆装置拨下称重平台并进入分药机构。药品单元进入分药机构中的分药框装置后,主控板根据药品单元的质量情况对分药机构发出控制信号,通过控制分药框的转动方向,完成药品分拨过程,从而实现药品单元检测工作。
2.2.2药品称重系统动力传输单元
药品称重系统的动力传输单元由3个步进电机组成,分别是控制转块的漏药电机、控制拨药杆的拨药电机以及控制分药框的分药电机。漏药电机负责带动转块的旋转,通过转块转动一定角度来调节对胶囊的挤压程度,并以转动方向的不同来进行药品单元分隔;拨药电机负责带动拨药杆的转动,通过拨药杆一定时间间隔转动固定的角度,使称重后的药品单元拨下称台并进入分药机构;分药电机负责带动分药框的转动,接收主控板的指令,根据药粒的重量信息,判断分药框的转动方向,从而将药品单元分离。
2.3SoUdWorks仿真建模
利用SolidWorics设计药品称重系统功能需求的零部件,组装成设计的机械系统,配置相应的仿真参数,模拟装置的运作过程。SolidWorfcs仿真中不涉及漏药机构的运动仿真。药品称重系统的拨药机构和分药机构的控制电机是间歇运动,电机的运动形式中选择插值算例方式,并以位移为控制变量,插值类型为线性,两个电机的插值算例如表1所示:
表1控制电机的插值算例
Table1Interpolationexampleofcontrollingmotor
|
|
时间/s |
位移(°) |
时间/s |
位移(°) |
|
1 |
0.20 |
90 |
0.00 |
0 |
|
2 |
0,40 |
90 |
0.30 |
0 |
|
3 |
0.60 |
180 |
0.50 |
90 |
|
4 |
0.80 |
180 |
0.70 |
90 |
|
5 |
1.00 |
270 |
0.90 |
180 |
2.4测控平台设计
药品称重系统的测控平台主要由2个部分来实现。1是基于ARM(advancedrisemachines)处理器的主控平台;2是基于单片机的从控平台。测控模块的工作流程是基于ARM处理器的主控平台通过I/O接口接收数据,并对接收数据判断,利用串口通信将控制信号发送到基于单片机处理器的从控平台,再由单片机处理器对传动机构发送控制信号。同时,基于ARM处理器的交互界面调用开发的应用程序实现数据统计。基于ARM处理器主控平台的工作流程图如图8所示。
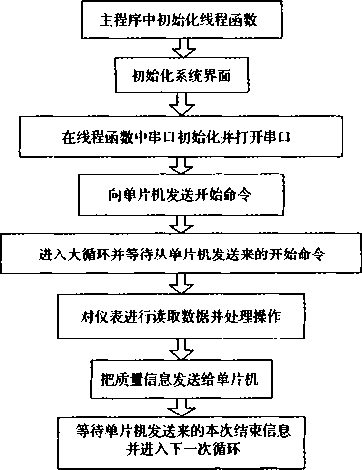
图8ARM主控平台的工作流程图
Fig.8WorkflowchartoftheARMhostcontrolplatform
基于单片机处理器的从控平台与基于ARM处理器的主控平台以串口通信方式连接,用于接收由主控平台发送的控制信号,从而向药品称重系统的传送机构中的步进式电机发送中断信号,控制传送机构的工作过程m,单片机从控平台的工作流程如图9所示。
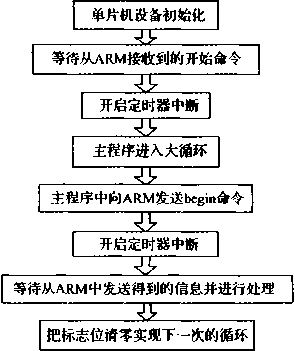
图9单片机从控平台的工作流程图
Fig.9Workflowchartofmicrocontrolunitsubordinatecontrolplatform
2.5MiniGUI开发环境搭建及界面设计
药品称重系统的人机交互界面采用轻量级界面开发系统MiniGUI,克服了主控平台资源有限的问题。用户界面的开发步骤是在PC端搭建Linux开发环境,将实现药品称重系统界面程序交叉编译生成的执行文件下载到基于ARM处理器的主控平台上,并运行执行文件。人机交互界面开发流程如图10所示。
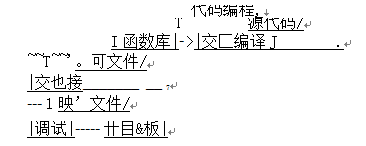
图10嵌入式开发流程图
Fig.10Thedevelopmentworkflowchartofthe
embeddedsystem
MiniGUI用户界面设计系统的架构如图11所示。
MiniGUI应用程序
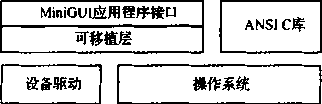
底层硬件
图11界面设计架构图
Fig.11FrameworkofGUIdesign
由于药品称重系统中人机交互界面功能只需开启药品称重系统和统计药品单元质量情况,因此界面结构采





 用主界面和单层子界面的形式,如图12所示。其中,主界面提供了开启功能的接口,点击主界面的开启功能按钮将跳转到用于统计药品单元质量情况的子界面,可以实时显示药品单元的数量、合格率等信息。
用主界面和单层子界面的形式,如图12所示。其中,主界面提供了开启功能的接口,点击主界面的开启功能按钮将跳转到用于统计药品单元质量情况的子界面,可以实时显示药品单元的数量、合格率等信息。
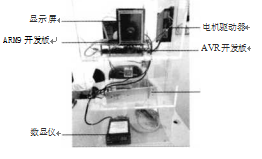




图12GUI界面设计结构图
Fig.12StructureofGUIdesign
3实验平台介绍
结合以上理论推导的结果及SolidWorks仿真运动过程模型,考虑已有的实验工艺条件,研制微量药品动态称重系统,该系统主要包括微量药品称重系统的传送机构、测控平台以及人机交互界面。药品称重系统的传动机构、系统整体结构的实物图,如图13-15所示。
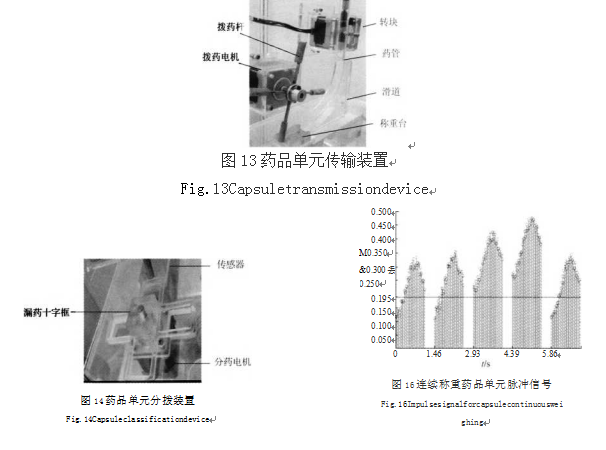
图13药品单元传输装置
Fig.13Capsuletransmissiondevice
4实验验证
为了验证微量药品称重系统的性能,对于所提出的微量药品单元动态称重的关键机构的参数进行了详细测量,具体尺寸参数如下:滑槽半径为74.5mm、滑道宽度(内)为8.7mm、滑道摩擦系数为1.2F/N,称重平台的长度为29.1mm、称重平台摩擦系数为2.5F/N,药品胶囊质量检测范围是0.1~0.3g,阈值之外质量为不合格。将以上参数代入已推导的药品单元的动力学模型及称重信号模型,可以得到:
S=10.5mmW29.1mm (15)
通过试验验证,采集称重仪表的电压信号并利用MATLAB对数据进行仿真,得到图16中的釆样信号,由于实验过程中第三、四胶囊的质量为0.3g(标重0.2g),造成药品单元在滑槽运动过程中冲击力增大,导致得到脉冲信号的幅度增大。接收信号阈值及药粒称重间隔也可由传感器信号转换公式和接收信号总误差A推算得出,接收信号阈值为0.195V,药粒称重间隔攵为1.46s左右。
5結论
本文提出了一种微量药品动态称重系统设计方法,实现微量药品单元的动态检测过程,合理地配置了药品称重系统的机械结构,并运用三维制图软件对系统进行了模拟设计。最后,通过设计实现的药品称重系统对药品胶囊进行数据采集,验证理论推导及仿真建模的正确性。在误差允许范围内,实验结果与理论推导结果基本一致,说明微量药品动态称重系统对微量药品单元的质量情况检测具有较高的可靠性和准确性,可以为微量药品动态称重系统的设计提供新的方法和思路。
文章来源于网络转载,侵删
 ×
×



